Java并发
🕙 Java并发
请简要描述线程与进程的关系,区别及优缺点?
图解进程和线程的关系
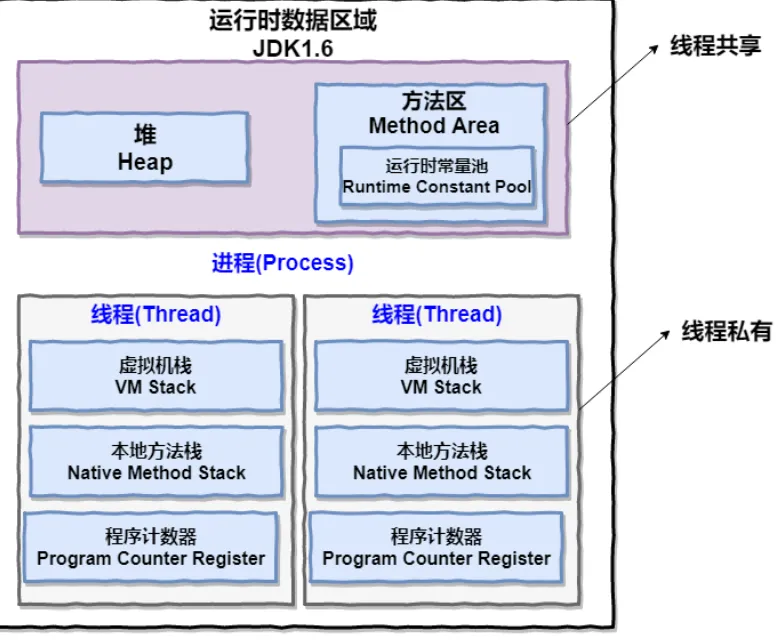
从上图可以看出:一个进程中可以有多个线程,多个线程共享进程的堆和方法区(JDK1.8之后的元空间)资源,但是每个线程有自己的程序计数器、虚拟机栈和本地方法栈。
总结:线程是进程划分成的更小的运行单位。线程和进程最大的不同在于基本上各进程是独立的,而各线程则不一定,因为同一进程中的线程极有可能会相互影响。线程执行开销小,但不利于资源的管理和保护;而进程正相反
程序计数器为什么是私有的?
程序计数器主要有下面两个作用:
- 字节码解释器通过改变程序计数器来依次读取指令,从而实现代码的流程控制,如:顺序执 行、选择、循环、异常处理。
- 在多线程的情况下,程序计数器用于记录当前线程执行的位置,从而当线程被切换回来的时 候能够知道该线程上次运行到哪儿了。
需要注意的是,如果执行的是native方法,那么程序计数器记录的是undefined地址,只有执行的是Java代码时程序计数器记录的才是下一条指令的地址。所以,程序计数器私有主要是为了线程切换后能恢复到正确的执行位置。
虚拟机栈和本地方法栈为什么是私有的?
- 虚拟机栈:每个Java方法在执行的同时会创建一个栈帧用于存储局部变量表、操作数栈、常量池引用等信息。从方法调用直至执行完成的过程,就对应着一个栈帧在Java虚拟机栈中入栈和出栈的过程。
- 本地方法栈:和虚拟机栈所发挥的作用非常相似,区别是:虚拟机栈为虚拟机执行Java方法(也就是字节码)服务,而本地方法栈则为虚拟机使用到的Native方法服务。在HotSpot虚拟机中和Java虚拟机栈合二为一。
所以,为了保证线程中的局部变量不被别的线程访问到,虚拟机栈和本地方法栈是线程私有的。
一句话简单了解堆和方法区
堆和方法区是所有线程共享的资源,其中堆是进程中最大的一块内存,主要用于存放新创建的对象(所有对象都在这里分配内存),方法区主要用于存放已被加载的类信息、常量、静态变量、即时编译器编译后的代码等数据。
精简版
进程是系统资源分配和调度的一个独立单位,每个进程有自己的内存空间和系统资源。一个进程可以包含多个线程,这些线程共享进程的堆和元空间(JDK1.8之后的方法区),但每个线程有自己的程序计数器、虚拟机栈和本地方法栈。线程作为进程内部的并发执行单位,切换代价小,但可能会相互影响。
线程是程序并发执行的最小单位,因为创建、销毁、切换的成本相较于进程更小,所以能够更好地提高程序的并发性和系统资源的利用率。
另外在这里还可以再扩展一下:协程和Java 19的虚拟线程
- 协程(Coroutines) 是一种比线程更轻量级的存在,它们的特点是可以在用户态进行调度,而无需涉及到系统调度,因此创建、切换的成本更低。不过,协程并不是由操作系统提供的概念,而是由特定的编程语言或者库提供。协程的一个重要特性是可以通过 yield 和 resume 操作进行手动调度,允许在函数内部保存状态,从而实现非常轻量级的任务切换和并发。
- Java 19引入了虚拟线程(Virtual Threads) 的概念,也被称为轻量级线程或者纤程(fibers)。虚拟线程是为了解决Java并发编程中的一些问题,比如高并发时线程资源的消耗,线程切换导致的性能开销等。相比于常规线程,虚拟线程的创建和切换开销更小,这是因为虚拟线程的调度不是由操作系统来完成,而是在用户态由Java运行时系统来完成。虚拟线程使得开发者可以在不担心性能和资源问题的前提下,创建大量的线程来提高程序的并发性能。
- https://docs.oracle.com/en/java/javase/19/core/virtual-threads.html 官方虚拟线程介绍
- https://www.javacodegeeks.com/2023/03/intro-to-java-virtual-threads.html 虚拟线程Java简介
- https://spring.io/blog/2022/10/11/embracing-virtual-threads 拥抱虚拟线程
- https://stackoverflow.com/questions/796217/what-is-the-difference-between-a-thread-and-a-fiber 线程和fibers有什么区别?
Java线程的创建方式
有四种方式可以用来创建线程:
- 继承Thread类
public class MyThread extends Thread {
@Override
public void run() {
System.out.println("This is a thread created by extending Thread class.");
}
public static void main(String[] args) {
MyThread myThread = new MyThread();
myThread.start();
}
}
- 实现Runnable接口
public class MyRunnable implements Runnable {
@Override
public void run() {
System.out.println("This is a thread created by implementing Runnable interface.");
}
public static void main(String[] args) {
MyRunnable myRunnable = new MyRunnable();
Thread thread = new Thread(myRunnable);
thread.start();
}
}
- Callable和FutureTask创建线程:为了解决异步执行的结果问题,Java语言在1.5版本之后提供了一种新的多线程创建方法:通过Callable接口和FutureTask类相结合创建线程。
import java.util.concurrent.Callable;
import java.util.concurrent.ExecutionException;
import java.util.concurrent.FutureTask;
public class MyCallable implements Callable<String> {
@Override
public String call() {
return "This is a thread created by using Callable and FutureTask.";
}
public static void main(String[] args) {
MyCallable myCallable = new MyCallable();
FutureTask<String> futureTask = new FutureTask<>(myCallable);
Thread thread = new Thread(futureTask);
thread.start();
try {
System.out.println(futureTask.get());
} catch (InterruptedException | ExecutionException e) {
e.printStackTrace();
}
}
}
- 线程池创建线程,使用Executors创建线程池
import java.util.concurrent.ExecutorService;
import java.util.concurrent.Executors;
public class ThreadPoolExample {
public static void main(String[] args) {
ExecutorService executorService = Executors.newFixedThreadPool(3);
Runnable task1 = () -> System.out.println("Task 1 is executed by a thread in the thread pool.");
Runnable task2 = () -> System.out.println("Task 2 is executed by a thread in the thread pool.");
Runnable task3 = () -> System.out.println("Task 3 is executed by a thread in the thread pool.");
executorService.execute(task1);
executorService.execute(task2);
executorService.execute(task3);
executorService.shutdown();
}
}
实现Runnable接口这种方式更受欢迎,因为这不需要继承Thread类。在应用设计中已经继承了别的对象的情况下,这需要多继承(而Java不支持多继承),只能实现接口。同时,线程池也是非常高效的,很容易实现和使用。
扩展:Java19如何创建一个虚拟线程
import java.util.concurrent.ExecutionException;
import java.util.concurrent.ExecutorService;
import java.util.concurrent.Executors;
import java.util.concurrent.TimeUnit;
public class FiberExample {
public static void main(String[] args) throws ExecutionException, InterruptedException {
ExecutorService executor = Executors.newSingleThreadExecutor();
executor.submit(() -> {
System.out.println("Hello from fiber!");
}).get();
executor.shutdown();
executor.awaitTermination(1, TimeUnit.SECONDS);
}
}
JMM 是什么?
网上的概念鱼龙混杂,笔者直接摘录部分《Java高并发核心编程》和《Java并发编程的艺术》中的介绍:
JMM(Java Memory Model and Thread Specification):定义了一个线程对共享变量写入时,如何确保对另一个线程是可见的。实际上,JMM提供了合理的禁用缓存以及禁止重排序的方法,所以其核心的价值在于解决可见性和有序性。
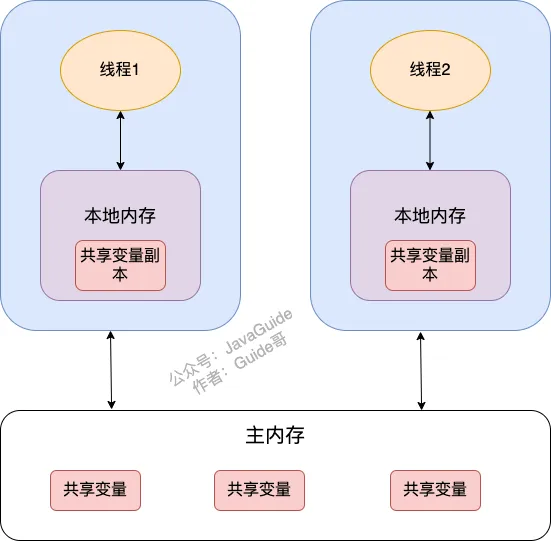
Java内存模型(JMM)有3个重要的概念: Java内存模型(JMM)是一种抽象的概念,它定义了Java程序如何与主内存和线程之间共享变量进行交互。JMM中最重要的概念就是“原子性”、“可见性”和“有序性”。其中,“原子性”指一个操作不可被中断或分割,同时对于所有其他线程来说,该操作要么完全执行要么完全不执行;“可见性”指当一个线程修改某个变量时,其他线程能够立即看到这个变化;“有序性”则是指指令重排的问题,在JMM中,禁止对存在控制依赖关系的指令进行重排序。
原子性:提供了synchronized关键字和java.util.concurrent包中的原子类来实现原子性。Java语言规范定义了一些基本数据类型的简单读取和赋值(非long和double的64位数据类型)也是原子操作。
可见性:使用主内存和工作内存的方式来实现可见性。主内存是线程之间共享的内存区域,而每个线程都有自己的工作内存。当线程读取共享变量时,JVM将该变量从主内存复制到线程的工作内存中,当线程修改变后,再将其写回主内存。这样就能够保证所有线程对于该变量的访问都是一致的。Java也提供了
volatile关键字来保证可见性。对标记为volatile的变量的写操作,会立即刷新到主内存,而读操作则会读取主内存的新值,这就保证了变量的改动对所有线程是可见的。有序性:使用指令重排和内存屏障(Memory Barrier)来实现有序性。指令重排是为了提高程序的执行效率,但可能会破坏程序的正确性。JVM通过插入内存屏障来禁止某些指令重排序,以此来保证程序的正确性。Java提供了
happens-before原则用来保证有序性。这是一种偏序关系,可以用来推断在一个线程中,什么操作会对另一个线程可见。这些规则包括:程序顺序原则、监视器锁原则、volatile变量原则、线程启动原则、线程终止原则、线程中断原则、对象终结原则和传递性原则。Java内存模型规定所有的变量都存储在主存中,JMM的主存类似于物理内存,但有区别,还能包含部分共享缓存。每个Java线程都有自己的工作内存(类似于CPU高速缓存,但也有区别)
- 主存:主要存储的是Java实例对象,所有线程创建的实例对象都存放在主存中,无论该实例对象是成员变量还是方法中的本地变量(也称局部变量),当然也包括共享的类信息、常量、静态变量。由于是共享数据区域,因此多条线程对同一个变量进行访问可能会发现线程安全问题。
- 工作内存:主要存储当前方法的所有本地变量信息(工作内存中存储着主存中的变量副本),每个线程只能访问自己的工作内存,即线程中的本地变量对其他线程是不可见的,即使两个线程执行的是同一段代码,它们也会各自在自己的工作内存中创建属于当前线程的本地变量,当然也包括字节码行号指示器、相关Native方法的信息。注意,由于工作内存是每个线程的私有数据,线程间无法相互访问工作内存,因此存储在工作内存的数据不存在线程安全问题。
JMM规定:
- 所有变量存储在主存中
- 每个线程都有自己的工作内存,且对变量的操作都是在工作内存中进行的
- 不同线程之间无法直接访问彼此工作内存中的变量,要想访问只能通过主存来传递。
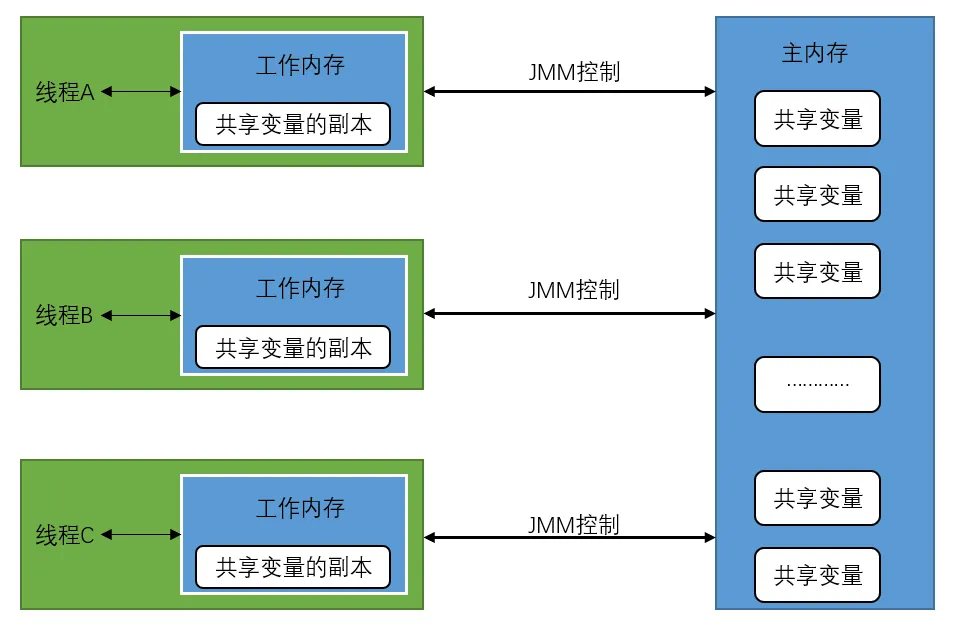
JMM将所有的变量都存放在公共主存中,当线程使用变量时,会把公共主存中的变量复制到自己的工作内存(或者叫作私有内存)中,线程对变量的读写操作是自己的工作内存中的变量副本。因此,JMM模型也需要解决代码重排序和缓存可见性问题。JMM提供了一套自己的方案去禁用缓存以及禁止重排序来解决这些可见性和有序性问题。JMM提供的方案包括大家都很熟悉的volatile、synchronized、final等。JMM定义了一些内存操作的抽象指令集,然后将这些抽象指令包含到Java的volatile、synchronized等关键字的语义中,并要求JVM在实现这些关键字时必须具备其包含的JMM抽象指令的能力。
举个🌰 如果线程A与线程B之间要通信的话,必须要经历下面2个步骤。
1)线程A把本地内存A中更新过的共享变量刷新到主内存中去。
2)线程B到主内存中去读取线程A之前已更新过的共享变量。
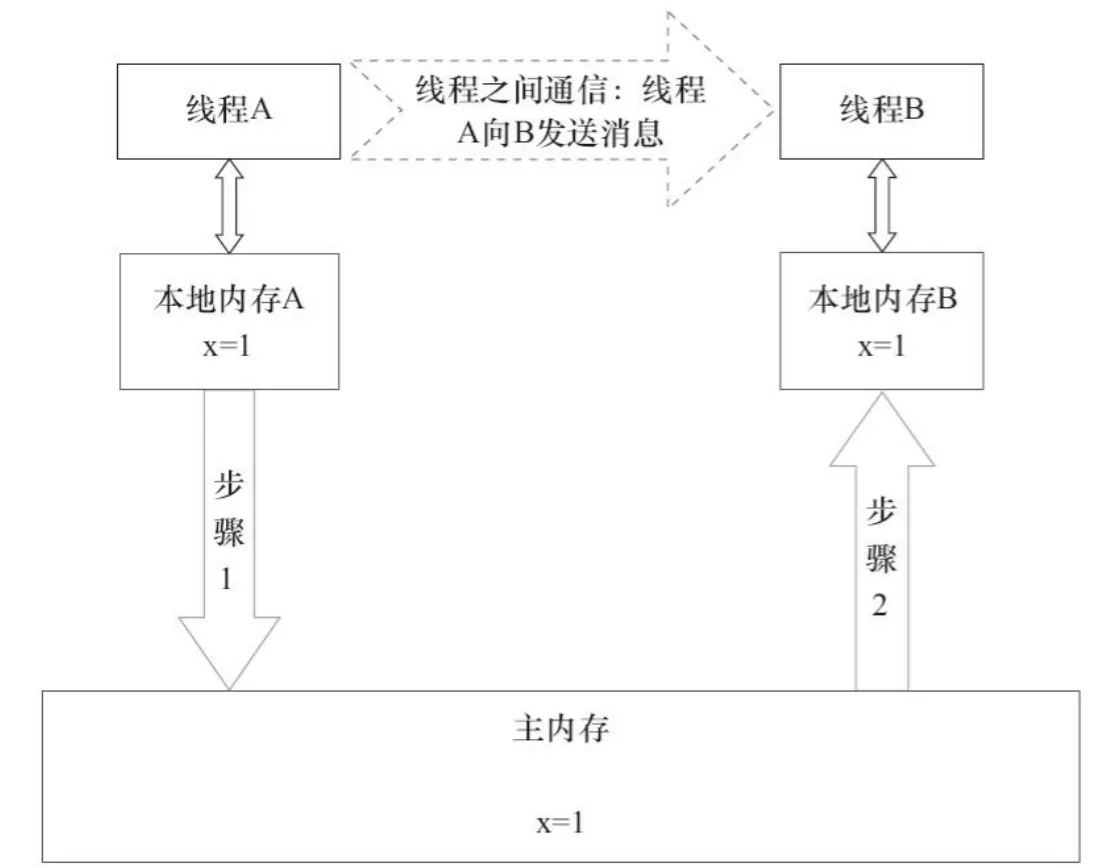
注意,根据JMM的规定,线程对共享变量的所有操作都必须在自己的本地内存中进行,不能直接从主内存中读取。
所以线程B并不是直接去主内存中读取共享变量的值,而是先在本地内存B中找到这个共享变量,发现这个共享变量已经被更新了,然后本地内存B去主内存中读取这个共享变量的新值,并拷贝到本地内存B中,最后线程B再读取本地内存B中的新值。
那么怎么知道这个共享变量的被其他线程更新了呢?这就是JMM的功劳了,也是JMM存在的必要性之一。JMM通过控制主内存与每个线程的本地内存之间的交互,来提供内存可见性保证。
解决混淆问题:JVM和JMM的区别?
Java虚拟机(JVM)和Java内存模型(JMM)是两个不同层次的概念,但它们都是Java运行时环境的重要组成部分。
- Java虚拟机(JVM):JVM是一个虚拟的计算机,它是Java运行环境的一部分,负责执行Java字节码。JVM有自己的一套字节码指令集,还有输入/输出流等系统资源。JVM负责Java程序的加载、验证、编译以及执行等操作。同时,JVM还负责垃圾回收(GC)操作,管理Java程序使用的内存。JVM的实现不仅可以让Java程序在不同的硬件和操作系统上运行,还可以优化和改进程序的性能。
- Java内存模型(JMM):JMM是一个抽象的概念,它定义了Java程序中各种共享变量(即线程之间共享的数据)的访问规则,包括原子性、可见性和有序性等特性。JMM主要关注的是多线程环境下如何正确处理共享变量,避免出现线程安全问题。JMM定义了主内存、工作内存、内存屏障、volatile、synchronized等概念和规则,这些是处理多线程内存可见性和顺序性的基础。
总的来说,JVM是Java运行时环境的实现,负责载入、编译、执行Java程序以及内存管理等功能。而JMM是Java为了解决多线程并发问题所做的内存层面的抽象,定义了Java程序的内存访问规则。
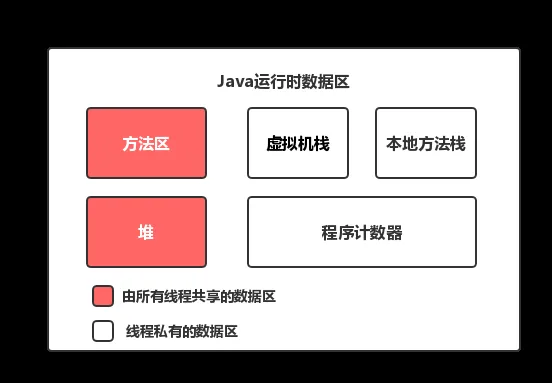
最后再附上JVM的运行时数据区
重排序
为了提高处理器的运行效率,编译器和处理器常常会对输入的程序进行优化,其中一种优化手段就是指令重排序。也就是说,程序在执行时,实际的执行顺序可能与代码在源文件中的顺序不同。重排序主要分为两类:编译器重排序和CPU重排序

编译器重排序指的是在代码编译阶段进行指令重排,不改变程序执行结果的情况下,为了提升效率,编译器对指令进行乱序(Out-of-Order)的编译。
编译器为什么要重排序(Re-Order)呢?它的目的为:与其等待阻塞指令(如等待缓存刷入)完成,不如先去执行其他指令。与CPU乱序执行相比,编译器重排序能够完成更大范围、效果更好的乱序优化。
CPU重排序包括两类:指令级重排序和内存系统重排序
- 指令级重排序。在不影响程序执行结果的情况下,CPU内核采用ILP(Instruction-Level Parallelism,指令级并行运算)技术来将多条指令重叠执行,主要是为了提升效率。如果指令之间不存在数据依赖性,CPU就可以改变语句的对应机器指令的执行顺序
- 内存系统重排序:对于现代的CPU来说,在CPU内核和主存之间都具备一个高速缓存,高速缓存的作用主要是减少CPU内核和主存的交互(CPU内核的处理速度要快得多),在CPU内核进行读操作时,如果缓存没有的话就从主存取,而对于写操作都是先写在缓存中,最后再一次性写入主存,原因是减少跟主存交互时CPU内核的短暂卡顿,从而提升性能。但是,内存系统重排序可能会导致一个问题——数据不一致。
As-if-Serial规则
在单核CPU的场景下,当指令被重排序之后,如何保障运行的正确性呢?其实很简单,编译器和CPU都需要遵守As-if-Serial规则。
"As-if-Serial"规则是Java内存模型(JMM)中的一个重要概念,这个规则保证了在单个线程中,不管怎样重排序(编译器的优化重排序,处理器的乱序执行等),(单线程)程序的执行结果不能被改变。
JMM是为了在多线程环境下,对主内存与工作内存之间的交互行为做出规定,以保证Java程序在并发处理时能获取到可预期的正确结果。这是一种规范,而非实现。
为了遵守As-if-Serial规则,编译器和CPU不会对存在数据依赖关系的操作进行重排序,因为这种重排序会改变执行结果。但是,如果指令之间不存在数据依赖关系,这些指令可能被编译器和CPU重排序。
As-if-Serial规则只能保障单内核指令重排序之后的执行结果正确,不能保障多内核以及跨CPU指令重排序之后的执行结果正确。
happens-before 原则是什么?
前提:在单线程环境中,重排序不会影响到程序执行的结果;但在多线程环境中,可能会导致严重的问题。比如,线程A在进行某些计算后,修改了共享变量的值,而线程B读取到的却是修改前的值,这可能会导致程序行为的不确定性。为了解决这个问题,Java内存模型提出了“happens-before”原则来约束重排序,为开发者提供了一种机制(如volatile关键字、synchronized关键字和Lock接口等)来保证多线程环境中的内存可见性,防止因重排序带来的问题。
happens-before 这个概念最早诞生于 Leslie Lamport 于 1978 年发表的论文《Time,Clocks and the Ordering of Events in a Distributed System》。在这篇论文中,Leslie Lamport 提出了逻辑时钟open in new window的概念,这也成了第一个逻辑时钟算法 。在分布式环境中,通过一系列规则来定义逻辑时钟的变化,从而能通过逻辑时钟来对分布式系统中的事件的先后顺序进行判断。逻辑时钟并不度量时间本身,仅区分事件发生的前后顺序,其本质就是定义了一种 happens-before 关系。
上面提到的 happens-before 这个概念诞生的背景并不是重点,简单了解即可。
JSR 133 引入了 happens-before 这个概念来描述两个操作之间的内存可见性。
为什么需要 happens-before 原则? happens-before 原则的诞生是为了程序员和编译器、处理器之间的平衡。程序员追求的是易于理解和编程的强内存模型,遵守既定规则编码即可。编译器和处理器追求的是较少约束的弱内存模型,让它们尽己所能地去优化性能,让性能最大化。happens-before 原则的设计思想其实非常简单:
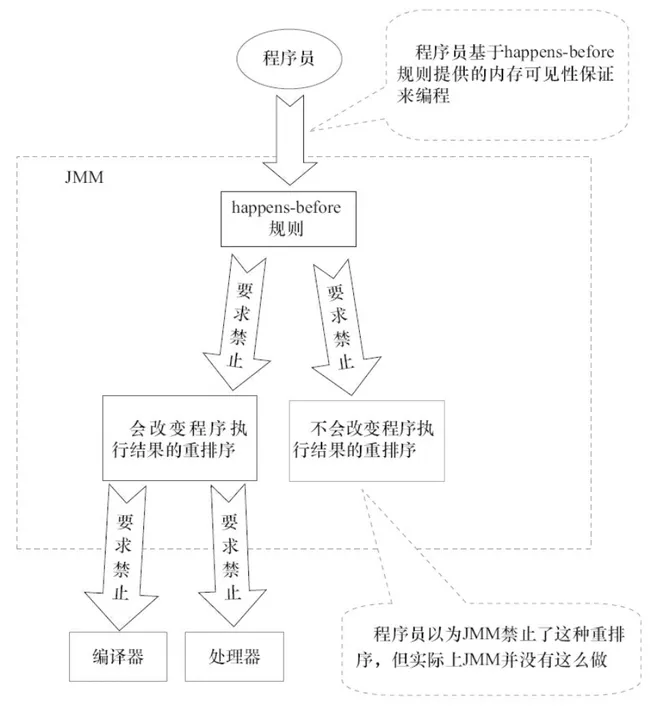
- 为了对编译器和处理器的约束尽可能少,只要不改变程序的执行结果(单线程程序和正确执行的多线程程序),编译器和处理器怎么进行重排序优化都行。
- 对于会改变程序执行结果的重排序,JMM 要求编译器和处理器必须禁止这种重排序。 下面这张是 《Java 并发编程的艺术》这本书中的一张 JMM 设计思想的示意图,非常清晰。
 了解了 happens-before 原则的设计思想,我们再来看看 JSR-133 对 happens-before 原则的定义:
了解了 happens-before 原则的设计思想,我们再来看看 JSR-133 对 happens-before 原则的定义: - 如果一个操作 happens-before 另一个操作,那么第一个操作的执行结果将对第二个操作可见,并且第一个操作的执行顺序排在第二个操作之前。
- 两个操作之间存在 happens-before 关系,并不意味着 Java 平台的具体实现必须要按照 happens-before 关系指定的顺序来执行。如果重排序之后的执行结果,与按 happens-before 关系来执行的结果一致,那么 JMM 也允许这样的重排序。
int userNum = getUserNum(); // 1
int teacherNum = getTeacherNum(); // 2
int totalNum = userNum + teacherNum; // 3
- 1 happens-before 2
- 2 happens-before 3
- 1 happens-before 3
虽然 1 happens-before 2,但对 1 和 2 进行重排序不会影响代码的执行结果,所以 JMM 是允许编译器和处理器执行这种重排序的。但 1 和 2 必须是在 3 执行之前,也就是说 1,2 happens-before 3 。
happens-before 原则表达的意义其实并不是一个操作发生在另外一个操作的前面,虽然这从程序员的角度上来说也并无大碍。更准确地来说,它更想表达的意义是前一个操作的结果对于后一个操作是可见的,无论这两个操作是否在同一个线程里。
举个例子:操作 1 happens-before 操作 2,即使操作 1 和操作 2 不在同一个线程内,JMM 也会保证操作 1 的结果对操作 2 是可见的。
Happens-Before规则
程序次序规则(Program Order Rule):在一个线程内,按照控制流顺序,书写在前面的操作先行发生(Happens-before)于书写在后面的操作。注意,这里说的是控制流顺序而不是程序代码顺序,因为要考虑分支、循环等结构。
举个例子:
int a = 1; // A
int b = 2; // B
int c = a + b; // C
根据程序次序规则,上述代码存在 3 个 Happens-before 关系:
- A Happens-before B
- B Happens-before C
- A Happens-before C
管程锁定规则(Monitor Lock Rule):一个 unlock 操作先行发生于后面对同一个锁的 lock 操作。这里必须强调的是 “同一个锁”,而 “后面” 是指时间上的先后。
这个规则其实就是针对 synchronized 的。JVM 并没有把 lock 和 unlock 操作直接开放给用户使用,但是却提供了更高层次的字节码指令 monitorenter 和 monitorexit 来隐式地使用这两个操作。这两个字节码指令反映到 Java 代码中就是同步块 — synchronized。
举个例子:
synchronized (this) { // 此处自动加锁
if (x > 1) {
x = 1;
}
} // 此处自动解锁
根据管程锁定规则,假设 x 的初始值是 10,线程 A 执行完代码块后 x 的值会变成 1,执行完自动释放锁,线程 B 进入代码块时,能够看到线程 A 对 x 的写操作,也就是线程 B 能够看到 x == 1。
volatile 变量规则(Volatile Variable Rule):对一个 volatile 变量的写操作先行发生于后面对这个变量的读操作,这里的 “后面” 同样是指时间上的先后。
这个规则就是 JDK 1.5 版本对 volatile 语义的增强,其意义之重大,靠着这个规则搞定可见性易如反掌。
举个例子:
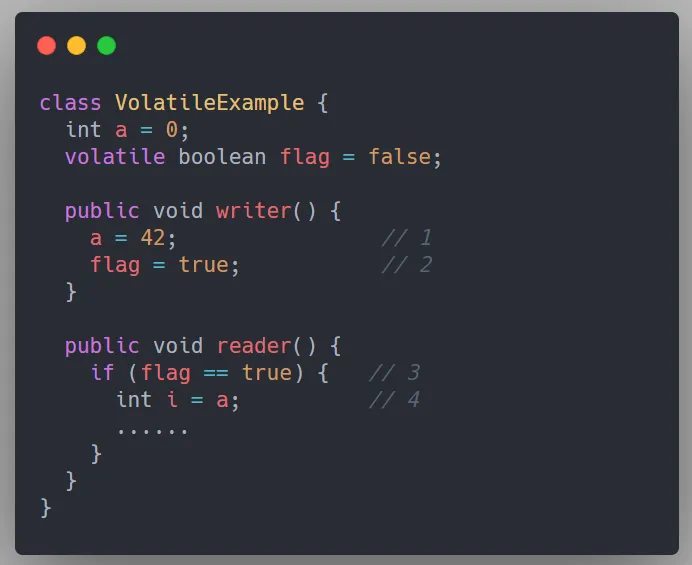
假设线程 A 执行 writer() 方法之后,线程 B 执行 reader() 方法。
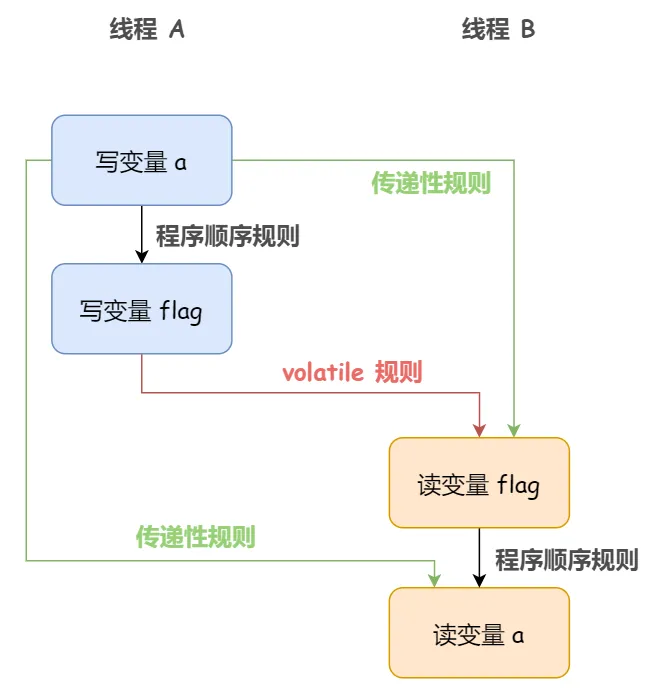
根据根据程序次序规则:1 Happens-before 2;3 Happens-before 4。
根据 volatile 变量规则:2 Happens-before 3。
根据传递性规则:1 Happens-before 3;1 Happens-before 4。
也就是说,如果线程 B 读到了 “flag==true” 或者 “int i = a” 那么线程 A 设置的“a=42”对线程 B 是可见的。
看下图:
线程启动规则(Thread Start Rule):Thread 对象的 start() 方法先行发生于此线程的每一个动作。
线程终止规则(Thread Termination Rule):线程中的所有操作都先行发生于对此线程的终止检测,我们可以通过 Thread 对象的 join() 方法是否结束、Thread 对象的 isAlive() 的返回值等手段检测线程是否已经终止执行。
线程中断规则(Thread Interruption Rule):对线程 interrupt() 方法的调用先行发生于被中断线程的代码检测到中断事件的发生,可以通过 Thread 对象的 interrupted() 方法检测到是否有中断发生。
对象终结规则(Finalizer Rule):一个对象的初始化完成(构造函数执行结束)先行发生于它的 finalize() 方法的开始。
传递性(Transitivity):如果操作 A 先行发生于操作 B,操作 B 先行发生于操作 C,那就可以得出操作 A 先行发生于操作 C 的结论。
happens-before 和 JMM 什么关系?
happens-before 与 JMM 的关系用《Java 并发编程的艺术》这本书中的一张图就可以非常好的解释清楚。 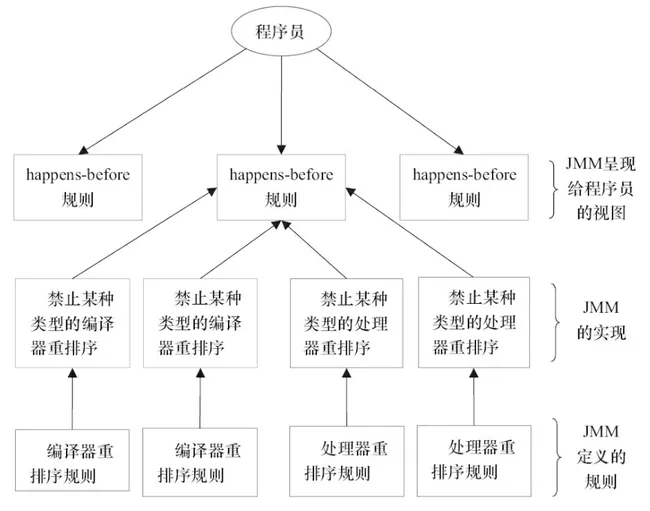
聊聊volatile
简要介绍
在Java中,volatile是一种关键字,用于修饰变量。当一个变量被volatile修饰后,意味着该变量的值可能在任意时刻被其他线程修改。因此,使用volatile能够实现多线程间数据的可见性。
具体来说,当一个线程修改了一个被volatile修饰的变量的值时,该变量的值会立即更新到主存中,而不是先更新到线程的缓存中。其他线程在读取该变量时,会直接从主存中获取最新的值。
前言
先要从 CPU 缓存模型 说起
为什么要弄一个 CPU 高速缓存呢? CPU Cache 缓存的是内存数据用于解决 CPU 处理速度和内存不匹配的问题,内存缓存的是硬盘数据用于解决硬盘访问速度过慢的问题。
为了更好地理解,我画了一个简单的 CPU Cache 示意图如下(实际上,现代的 CPU Cache 通常分为三层,分别叫 L1,L2,L3 Cache):
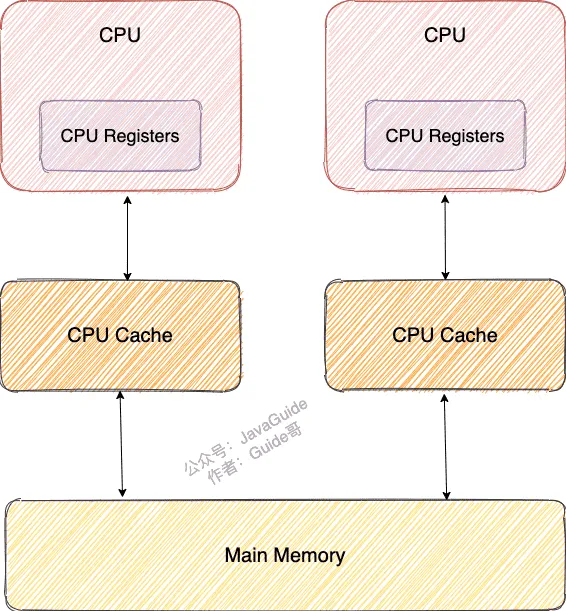
CPU Cache 的工作方式:
先复制一份数据到 CPU Cache 中,当 CPU 需要用到的时候就可以直接从 CPU Cache 中读取数据,当运算完成后,再将运算得到的数据写回 Main Memory 中。但是,这样存在 内存缓存不一致性的问题 !比如我执行一个 i++操作的话,如果两个线程同时执行的话,假设两个线程从 CPU Cache 中读取的 i=1,两个线程做了 1++运算完之后再写回 Main Memory 之后 i=2,而正确结果应该是 i=3。
CPU 为了解决内存缓存不一致性问题可以通过制定缓存一致协议或者其他手段来解决。
前面介绍过,为了解决CPU访问主存时主存读写性能的短板,在CPU中增加了高速缓存,但这带来了可见性问题。而Java的volatile关键字可以保证共享变量的主存可见性,也就是将共享变量的改动值立即刷新回主存。在正常情况下,系统操作并不会校验共享变量的缓存一致性,只有当共享变量用volatile关键字修饰了,该变量所在的缓存行才被要求进行缓存一致性的校验。
📖《Java并发编程实战》中这样说到:
Java语言提供了一种稍弱的同步机制,即volatile变量,用来确保将变量的更新操作通知到其他线程。当把变量声明为volatile类型后,编译器与运行时都会注意到这个变量是共享的,因此不会将该变量上的操作与其他内存操作一起重排序。volatile变量不会被缓存在寄存器或者对其他处理器不可见的地方,因此在读取volatile类型的变量时总会返回最新写入的值
volatile变量对可见性的影响比volatile变量本身更为重要。当线程A首先写入一个volatile变量并且线程B随后读取该变量时,在写入volatile变量之前对A可见的所有变量的值,在B读取了volatile变量后,对B也是可见的。因此,从内存可见性的角度来看,写入volatile变量相当于退出同步代码块,而读取volatile变量就相当于进入同步代码块。
实现原理
- 字节码层面:
volatile在字节码层面,就是使用访问标志:ACC_VOLATILE来表示,供后续操作此变量时判断访问标志是否为ACC_VOLATILE,来决定是否遵循volatile的语义处理。 - volatile保证可见性跟内存屏障有关。
public class Singleton {
private volatile static Singleton instance;
private Singleton (){}
public static Singleton getInstance() {
if (instance == null) {
synchronized (Singleton.class) {
if (instance == null) {
instance = new Singleton();
}
}
}
return instance;
}
}
编译后,对比有volatile关键字和没有volatile关键字时所生成的汇编代码,发现有volatile关键字修饰时,会多出一个lock addl $0x0,(%esp),即多出一个lock前缀指令,lock指令相当于一个内存屏障
lock指令相当于一个内存屏障,它保证以下这几点:
- 重排序时不能把后面的指令重排序到内存屏障之前的位置
- 将本处理器的缓存写入内存
- 如果是写入动作,会导致其他处理器中对应的缓存无效。
第2点和第3点就是保证volatile保证可见性的体现嘛
内存屏障
前言:内存屏障本质上是一系列cpu指令。内存屏障是硬件层的概念。语义上,内存屏障之前的所有写操作都要写入内存;内存屏障之后的读操作都可以获得同步屏障之前的写操作的结果。因此,对于敏感的程序块,写操作之后、读操作之前可以插入内存屏障。
如何保障跨CPU指令重排序之后的程序结果正确呢?需要用到内存屏障。
维基百科的定义:
也称内存栅栏,内存栅障,屏障指令等,是一类同步屏障指令,它使得 CPU 或编译器在对内存进行操作的时候, 严格按照一定的顺序来执行, 也就是说在内存屏障之前的指令和之后的指令不会由于系统优化等原因而导致乱序。
是让一个CPU高速缓存的内存状态对其他CPU内核可见的一项技术,也是一项保障跨CPU内核有序执行指令的技术。硬件层常用的内存屏障分为三种:读屏障(Load Barrier)、写屏障(Store Barrier)和全屏障(Full Barrier)
读屏障
读屏障让高速缓存中相应的数据失效。在指令前插入读屏障,可以让高速缓存中的数据失效,强制重新从主存加载数据。并且,读屏障会告诉CPU和编译器,先于这个屏障的指令必须先执行。
读屏障对应着X86处理器上的lfence指令,将强制所有在该指令之后的读操作都在lfence指令执行之后被执行,并且强制本地高速缓冲区的值全部失效,以便从主存中重新读取共享变量的值。
读屏障既使得当前CPU内核对共享变量的更改对所有CPU内核可见,又阻止了一些可能导致读取无效数据的指令重排。
写屏障
在指令后插入写屏障指令能让高速缓存中的最新数据更新到主存,让其他线程可见。并且,写屏障会告诉CPU和编译器,后于这个屏障的指令必须后执行。
写屏障对应X86处理器上的sfence指令,sfence指令会保证所有写操作都在该指令执行之前被完成,并把高速缓冲区的数据都刷新到主存中,使得当前CPU对共享变量的更改对所有CPU可见。
全屏障
全屏障是一种全能型的屏障,具备读屏障和写屏障的能力。Full Barrier又称为StoreLoad Barriers,对应X86处理器上的mfence指令。
在X86处理器平台上mfence指令综合了sfence指令与lfence指令的作用。X86处理器强制所有在mfence之前的store/load指令都在mfence执行之前被执行;所有在mfence之后的store/load指令都在该mfence执行之后被执行。简单来说,X86处理器禁止对mfence指令前后的store/load指令进行重排序。
X86处理器上的lock前缀指令也具有内存全屏障的功能。lock前缀后面可以跟ADD、ADC、AND、BTC、BTR、BTS、CMPXCHG、CMPXCH8B、DEC、INC、NEG、NOT、OR、SBB、SUB、XOR、XADD、XCHG等指令。
作用
(1)阻止屏障两侧的指令重排序
编译器和CPU可能为了使性能得到优化而对指令重排序,但是插入一个硬件层的内存屏障相当于告诉CPU和编译器先于这个屏障的指令必须先执行,后于这个屏障的指令必须后执行。
(2)强制让高速缓存的数据失效
硬件层的内存屏障强制把高速缓存中的最新数据写回主存,让高速缓存中相应的脏数据失效。一旦完成写入,任何访问这个变量的线程将会得到最新的值。
如何禁止指令重排序
在 Java 中,volatile 关键字除了可以保证变量的可见性,还有一个重要的作用就是防止 JVM 的指令重排序。 如果我们将变量声明为 volatile ,在对这个变量进行读写操作的时候,会通过插入特定的 内存屏障 的方式来禁止指令重排序。在 Java 中,Unsafe 类提供了三个开箱即用的内存屏障相关的方法,屏蔽了操作系统底层的差异:
public native void loadFence();
public native void storeFence();
public native void fullFence();
理论上来说,你通过这个三个方法也可以实现和volatile禁止重排序一样的效果,只是会麻烦一些。下面我以一个常见的面试题为例讲解一下 volatile 关键字禁止指令重排序的效果。面试中面试官经常会说:“单例模式了解吗?来给我手写一下!给我解释一下双重检验锁方式实现单例模式的原理呗!” 双重校验锁实现对象单例(线程安全) :
public class Singleton {
private volatile static Singleton uniqueInstance;
private Singleton() {
}
public static Singleton getUniqueInstance() {
//先判断对象是否已经实例过,没有实例化过才进入加锁代码
if (uniqueInstance == null) {
//类对象加锁
synchronized (Singleton.class) {
if (uniqueInstance == null) {
uniqueInstance = new Singleton();
}
}
}
return uniqueInstance;
}
}
uniqueInstance 采用 volatile 关键字修饰也是很有必要的, uniqueInstance = new Singleton(); 这段代码其实是分为三步执行:为 uniqueInstance 分配内存空间初始化 uniqueInstance将 uniqueInstance 指向分配的内存地址但是由于 JVM 具有指令重排的特性,执行顺序有可能变成 1->3->2。指令重排在单线程环境下不会出现问题,但是在多线程环境下会导致一个线程获得还没有初始化的实例。例如,线程 T1 执行了 1 和 3,此时 T2 调用 getUniqueInstance() 后发现 uniqueInstance 不为空,因此返回 uniqueInstance,但此时 uniqueInstance 还未被初始化。
例子拓展
可能看到这里小伙伴们还是只能理解volatile有禁止重排序的效果,但是还是无法理解(如果你理解,可以跳过)。那么再举一个例子:
public class VolatileExample {
private volatile int number = 0;
private boolean ready = false;
public void write() {
number = 42;
ready = true;
}
public void read() {
if (ready) {
System.out.println(number);
}
}
}
在上面的代码中,我们定义了一个类VolatileExample,其中包含了一个volatile变量number和一个普通变量ready。当主线程执行write方法时,会设置number的值为42,并将ready标记为true。在另外一个线程中,执行read方法,如果ready为true,则输出number的值。
假如number不是volatile类型,在写入number数据的时候,编译器可能就会将语句:number=42;与语句:ready=true;重排序,以此来优化程序性能。但是,如果这两个语句被重排序了,那么在另外一个线程中执行read方法时,由于ready的值为true,所以会输出number的值,但是此时可能number的值还没有被正确写入。
使用volatile关键字修饰number后,就可以避免这种重排序,确保number的值被正确的写入和读取。
CAS 是什么?
如何实现无锁的递增计数器?CAS
cas 叫做 CompareAndSwap,比较并交换,很多地方使用到了它,比如锁升级中自旋锁就有用到,主要是通过处理器的指令来保证操作的原子性,它主要包含三个变量:
- 1.变量内存地址
- 2.旧的预期值 A
- 3.准备设置的新值 B
当一个线程需要修改一个共享变量的值,完成这个操作需要先取出共享变量的值,赋给 A,基于 A 进行计算,得到新值 B,在用预期原值 A 和内存中的共享变量值进行比较,如果相同就认为其他线程没有进行修改,而将新值写入内存
CAS的缺点
- CPU开销比较大:在并发量比较高的情况下,如果许多线程反复尝试更新某一个变量,却又一直更新不成功,又因为自旋的时候会一直占用CPU,如果CAS一直更新不成功就会一直占用,造成CPU的浪费。
- ABA 问题:比如线程 A 去修改 1 这个值,修改成功了,但是中间 线程 B 也修改了这个值,但是修改后的结果还是 1,所以不影响 A 的操作,这就会有问题。可以用版本号来解决这个问题。
- 只能保证一个共享变量的原子性
📖《offer来了》这样定义CAS的:**CAS(Compare And Swap)**指比较并交换。CAS算法CAS(V, E, N)包含3个参数,V表示要更新的变量,E表示预期的值,N表示新值。在且仅在V值等于 E值时,才会将V值设为 N,如果 V值和 E值不同,则说明已经有其他线程做了更新,当前线程什么都不做。最后,CAS返回当前V的真实值。
- CAS的特性:乐观锁
- CAS自旋等待:在JDK的原子包java.util.concurrent.atomic里面提供了一组原子类,这些原子类的基本特性就是在多线程环境下,在有多个线程同时执行这些类的实例包含的方法时,会有排他性。其内部便是基于CAS算法实现的,即在某个线程进入方法中执行其中的指令时,不会被其他线程打断;而别的线程就像自旋锁一样,一直等到该方法执行完成才由JVM从等待的队列中选择另一个线程进入。
🙋笔者认为介绍CAS最简单的方法就是举个🌰给面试官听:
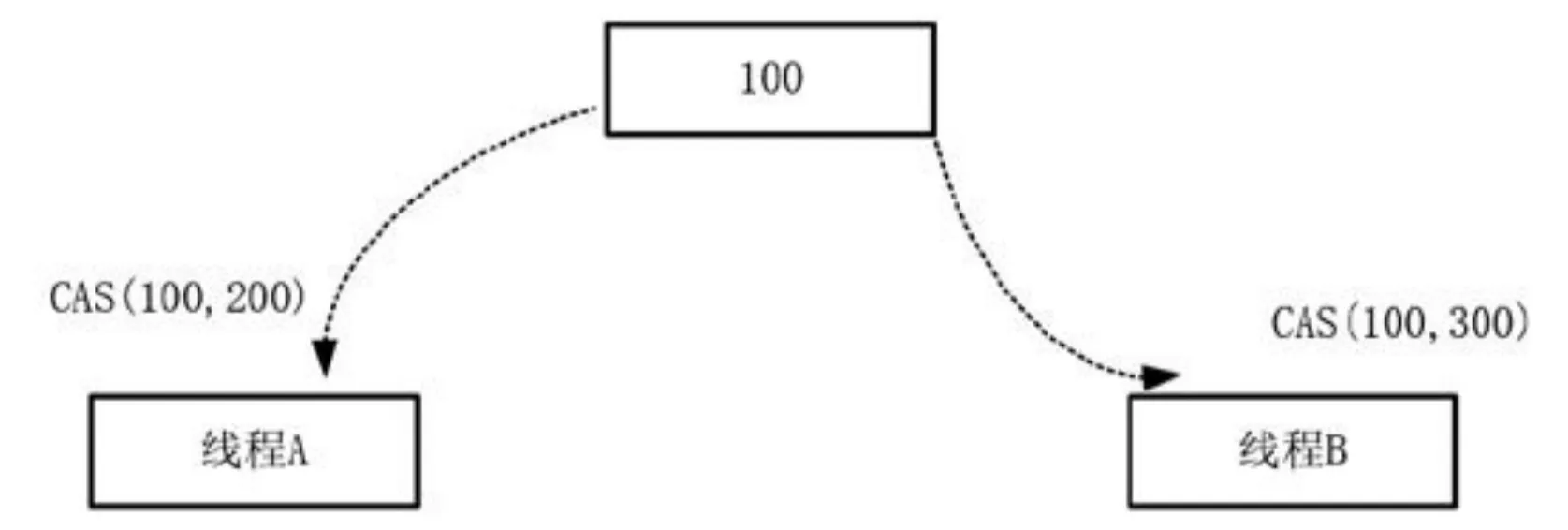
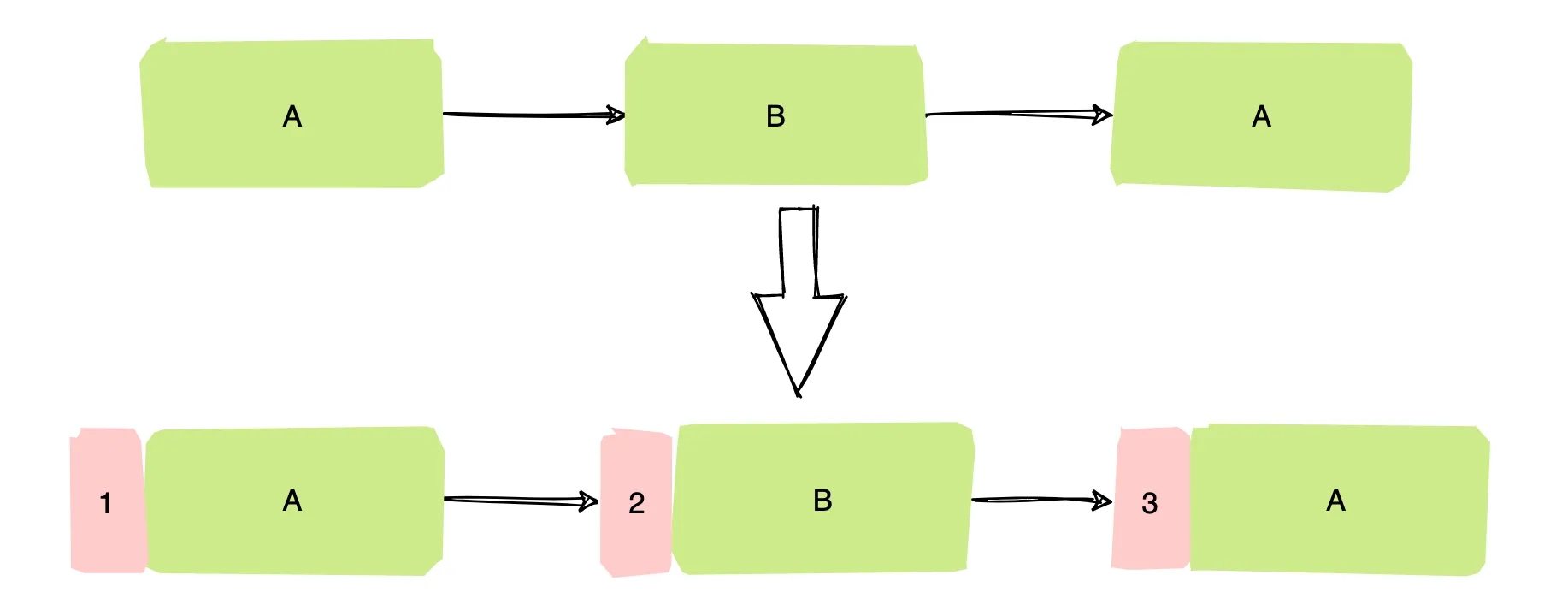
假如某个内存地址(某对象的属性)的值为100,现在有两个线程(线程A和线程B)使用CAS无锁编程对该内存地址进行更新,线程A欲将其值更新为200,线程B欲将其值更新为300,如图3-1所示。
线程是并发执行的,谁都有可能先执行。但是CAS是原子操作,对同一个内存地址的CAS操作在同一时刻只能执行一个。因此,在这个例子中,要么线程A先执行,要么线程B先执行。假设线程A的CAS(100,200)执行在前,由于内存地址的旧值100与该CAS的期望值100相等,因此线程A会操作成功,内存地址的值被更新为200。(图来自《Java高并发核心编程》)
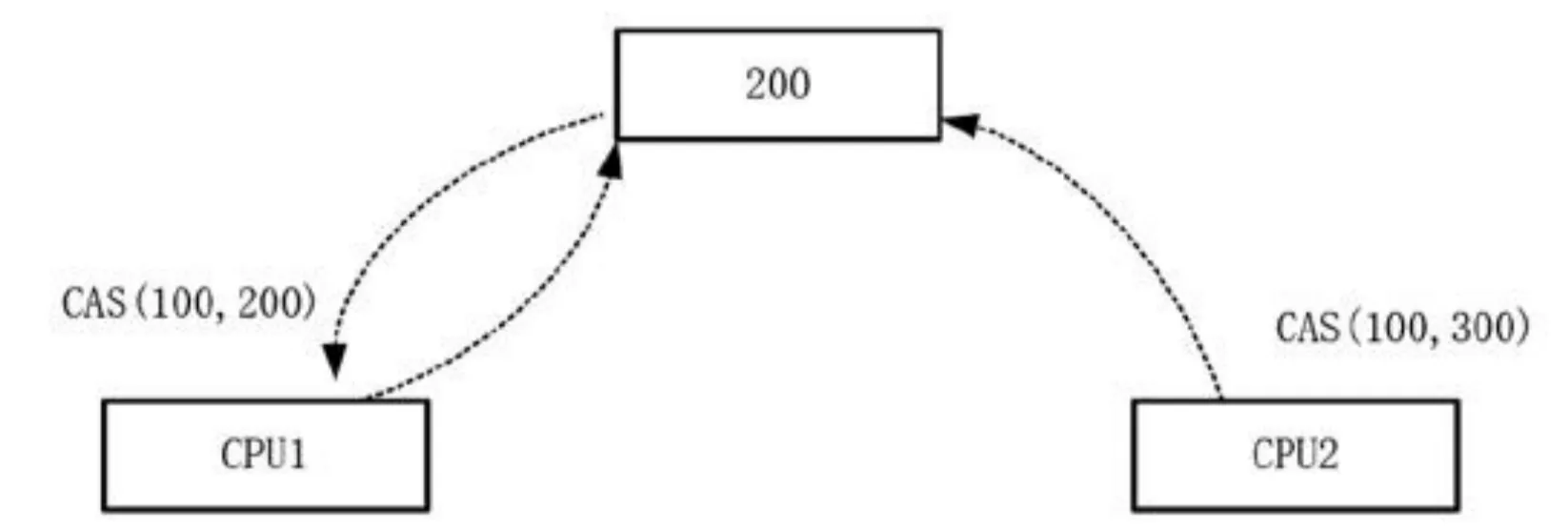
image-20220626202716155 线程A执行CAS(100,200)成功之后,内存地址的
image-20220626202746011 接下来执行线程B的CAS(100,300)操作,此时内存地址的值为200,不等于CAS的期望值100,线程B操作失败。线程B只能自旋,开始新的循环,这一轮循环首先获取到内存地址的值200,然后进行CAS(200,300)操作,这一次内存地址的值与CAS的预期值(oldValue)相等,线程B操作成功。
ABA问题
ABA 是 CAS 操作的一个经典问题,假设有一个变量初始值为 A,修改为 B,然后又修改为 A,这个变量实际被修改过了,但是 CAS 操作可能无法感知到。
如果是整形还好,不会影响最终结果,但如果是对象的引用类型包含了多个变量,引用没有变实际上包含的变量已经被修改,这就会造成大问题。
如何解决?思路其实很简单,在变量前加版本号,每次变量更新了就把版本号加一,结果如下:
最终结果都是 A 但是版本号改变了。
从 JDK 1.5 开始提供了 AtomicStampedReference类,这个类的 compareAndSe 方法首先检查 当前引用是否等于 预期引用,并且 当前标志是否等于 预期标志,如果全部相等,则以原子方式将该引用和该标志的值设置为给定的更新值。
自旋开销问题
CAS 出现冲突后就会开始 自旋操作,如果资源竞争非常激烈,自旋长时间不能成功就会给 CPU 带来非常大的开销。
解决方案:可以考虑限制自旋的次数,避免过度消耗 CPU;另外还可以考虑延迟执行。
只能保证单个变量的原子性
当对一个共享变量执行操作时,可以使用 CAS 来保证原子性,但是如果要对多个共享变量进行操作时,CAS 是无法保证原子性的,比如需要将 i 和 j 同时加 1:
i++;j++;
这个时候可以使用 synchronized 进行加锁,有没有其他办法呢?有,将多个变量操作合成一个变量操作。从 JDK1.5 开始提供了 AtomicReference 类来保证引用对象之间的原子性,你可以把多个变量放在一个对象里来进行CAS操作。
说说 sleep() 方法和 wait() 方法区别和共同点?
(最主要的区别)锁持有:
sleep()方法:在睡眠期间,线程并没有释放所持有的锁。wait()方法:调用wait()方法后,线程会释放所持有的锁,允许其他线程使用同步代码块。
线程暂停执行:
- 两者都可以使线程暂停执行,但是他们通常应用在不同的上下文。
使用场景:
wait()方法:常被用于线程间的交互/通信,特别是在生产者消费者模式中,用于告知某个正在等待的线程,现在可以开始工作了。sleep()方法:常被用于暂停执行,比如模拟 IO 操作、复杂计算或者其他任何可能需要花费时间的操作后,暂停一段时间再继续执行。
线程苏醒:
wait()方法:线程不会自动苏醒,需要其他线程调用notify()或notifyAll()方法来唤醒等待的线程。然而,可以指定一个超时参数(wait(long timeout)),在超时期满后线程会自动苏醒。sleep()方法:不需要被其他线程显式唤醒。当指定的睡眠时间到了,线程会自动苏醒。
所属类别:Java中,sleep() 方法是 Thread 类的静态方法,这意味着,它会对当前正在执行的线程进行操作。而 wait() 方法是从 Object 类继承的,每个对象都有 wait() 方法,它需要在同步块或同步方法中被调用,意味着调用 wait() 的线程必须拥有该对象的锁。
为什么我们调用 start() 方法时会执行 run() 方法,为什么我们不能直接调用 run() 方法?
这是另一个非常经典的 Java 多线程面试问题,而且在面试中会经常被问到。很简单,但是很多人都会答不上来!
new 一个 Thread,线程进入了新建状态。调用 start()方法,会启动一个线程并使线程进入了就绪状态,当分配到时间片后就可以开始运行了。 start() 会执行线程的相应准备工作,然后自动执行 run() 方法的内容,这是真正的多线程工作。 但是,直接执行 run() 方法,会把 run() 方法当成一个 main 线程下的普通方法去执行,并不会在某个线程中执行它,所以这并不是多线程工作。
总结: 调用 start() 方法方可启动线程并使线程进入就绪状态,直接执行 run() 方法的话不会以多线程的方式执行。
synchronized汇总
说一说自己对于 synchronized 关键字的了解
synchronized 关键字解决的是多个线程之间访问资源的同步性,synchronized关键字可以保证被它修饰的方法或者代码块在任意时刻只能有一个线程执行。
在 Java 早期版本中,synchronized 属于 重量级锁,效率低下。这是因为监视器锁(monitor)是依赖于底层的操作系统的 Mutex Lock 来实现的,Java 的线程是映射到操作系统的原生线程之上的。如果要挂起或者唤醒一个线程,都需要操作系统帮忙完成,而操作系统实现线程之间的切换时需要从用户态转换到内核态,这个状态之间的转换需要相对比较长的时间,时间成本相对较高。
不过,在 Java 6 之后, synchronized 引入了大量的优化如自旋锁、适应性自旋锁、锁消除、锁粗化、偏向锁、轻量级锁等技术来减少锁操作的开销,这些优化让 synchronized 锁的效率提升了很多。因此, synchronized 还是可以在实际项目中使用的,像 JDK 源码、很多开源框架都大量使用了 synchronized 。
所以,你会发现目前的话,不论是各种开源框架还是 JDK 源码都大量使用了 synchronized 关键字。
📖笔者个人认为《offer来了》里面解释Java中的关键字是真的不错,上述截取的Guide,但是过于晦涩,所以截取了里面对synchronized 的解释:
🙋♂️synchronized关键字用于为Java对象、方法、代码块提供线程安全的操作。synchronized属于独占式的悲观锁,同时属于可重入锁。在使用synchronized修饰对象时,同一时刻只能有一个线程对该对象进行访问;在synchronized修饰方法、代码块时,同一时刻只能有一个线程执行该方法体或代码块,其他线程只有等待当前线程执行完毕并释放锁资源后才能访问该对象或执行同步代码块。Java中的每个对象都有个monitor对象,加锁就是在竞争monitor(监视器锁)对象。对代码块加锁是通过在前后分别加上monitorenter和monitorexit指令实现的,对方法是否加锁是通过一个标记位来判断的。
讲一下 synchronized 关键字的底层原理
synchronized 同步语句块的情况
public class SynchronizedDemo {
public void method() {
synchronized (this) {
System.out.println("synchronized 代码块");
}
}
}
通过 JDK 自带的 javap 命令查看 SynchronizedDemo 类的相关字节码信息:首先切换到类的对应目录执行 javac SynchronizedDemo.java 命令生成编译后的 .class 文件,然后执行 javap -c -s -v -l SynchronizedDemo.class。
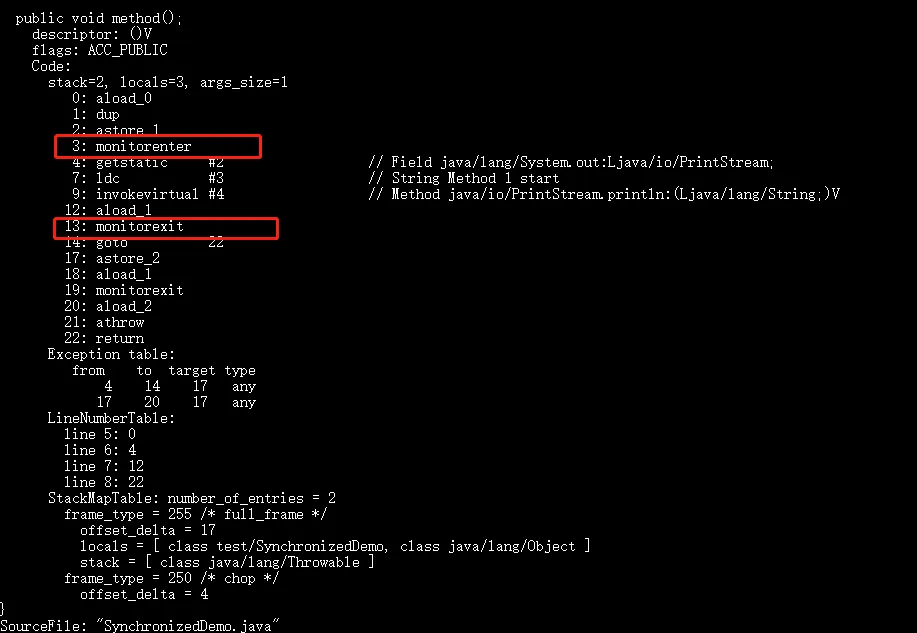
从上面我们可以看出:synchronized 同步语句块的实现使用的是 monitorenter 和 monitorexit 指令,其中 monitorenter 指令指向同步代码块的开始位置,monitorexit 指令则指明同步代码块的结束位置。
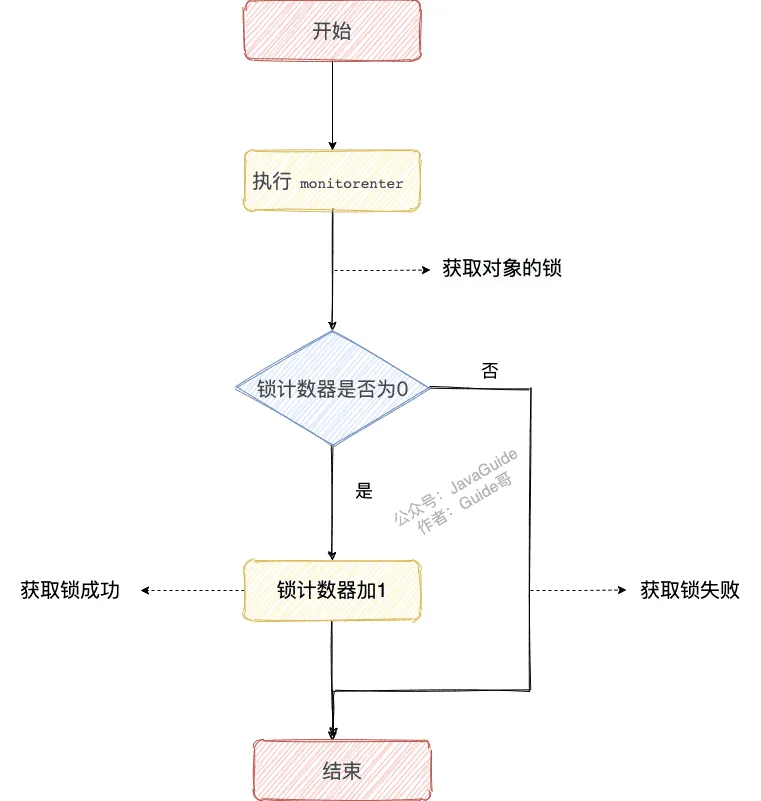
当执行 monitorenter 指令时,线程试图获取锁也就是获取 对象监视器 monitor 的持有权。
在 Java 虚拟机(HotSpot)中,Monitor 是基于 C++实现的,由ObjectMonitor
实现的。每个对象中都内置了一个
ObjectMonitor对象。另外,
wait/notify等方法也依赖于monitor对象,这就是为什么只有在同步的块或者方法中才能调用wait/notify等方法,否则会抛出java.lang.IllegalMonitorStateException的异常的原因。
在执行 monitorenter时,会尝试获取对象的锁,如果锁的计数器为 0 则表示锁可以被获取,获取后将锁计数器设为 1 也就是加 1。
对象锁的的拥有者线程才可以执行 monitorexit 指令来释放锁。在执行 monitorexit 指令后,将锁计数器设为 0,表明锁被释放,其他线程可以尝试获取锁。
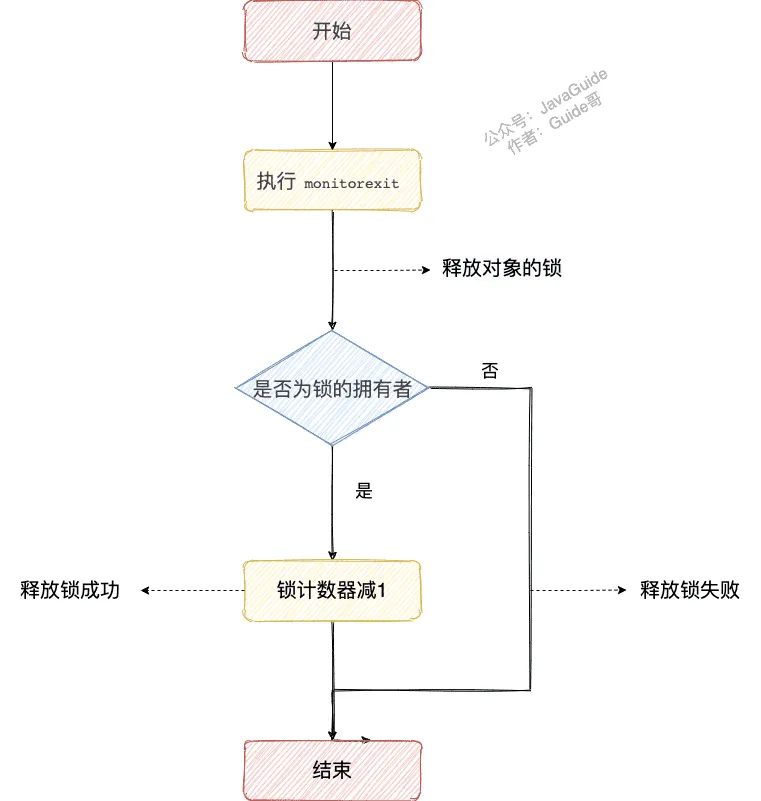
如果获取对象锁失败,那当前线程就要阻塞等待,直到锁被另外一个线程释放为止。
synchronized 修饰方法的的情况
public class SynchronizedDemo2 {
public synchronized void method() {
System.out.println("synchronized 方法");
}
}
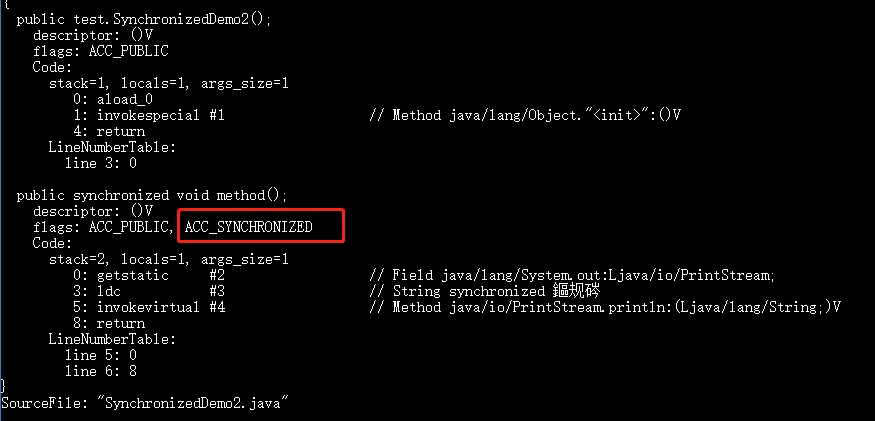
synchronized 修饰的方法并没有 monitorenter 指令和 monitorexit 指令,取得代之的确实是 ACC_SYNCHRONIZED 标识,该标识指明了该方法是一个同步方法。JVM 通过该 ACC_SYNCHRONIZED 访问标志来辨别一个方法是否声明为同步方法,从而执行相应的同步调用。
如果是实例方法,JVM 会尝试获取实例对象的锁。如果是静态方法,JVM 会尝试获取当前 class 的锁。
总结
synchronized 同步语句块的实现使用的是 monitorenter 和 monitorexit 指令,其中 monitorenter 指令指向同步代码块的开始位置,monitorexit 指令则指明同步代码块的结束位置。
synchronized 修饰的方法并没有 monitorenter 指令和 monitorexit 指令,取得代之的确实是 ACC_SYNCHRONIZED 标识,该标识指明了该方法是一个同步方法。
不过两者的本质都是对对象监视器 monitor 的获取。
说说 synchronized 关键字和 volatile 关键字的区别
synchronized 关键字和 volatile 关键字是两个互补的存在,而不是对立的存在!
volatile关键字是线程同步的轻量级实现,所以volatile性能肯定比synchronized关键字要好 。但是volatile关键字只能用于变量而synchronized*同步的* 关键字可以修饰方法以及代码块 。volatile关键字能保证数据的可见性,但不能保证数据的原子性。synchronized关键字两者都能保证。volatile关键字主要用于解决变量在多个线程之间的可见性,而synchronized关键字解决的是多个线程之间访问资源的同步性。
synchronized 锁升级的过程
在 Java1.6 之前的版本中,synchronized 属于重量级锁,效率低下,锁是 cpu 一个总量级的资源,每次获取锁都要和 cpu 申请,非常消耗性能。
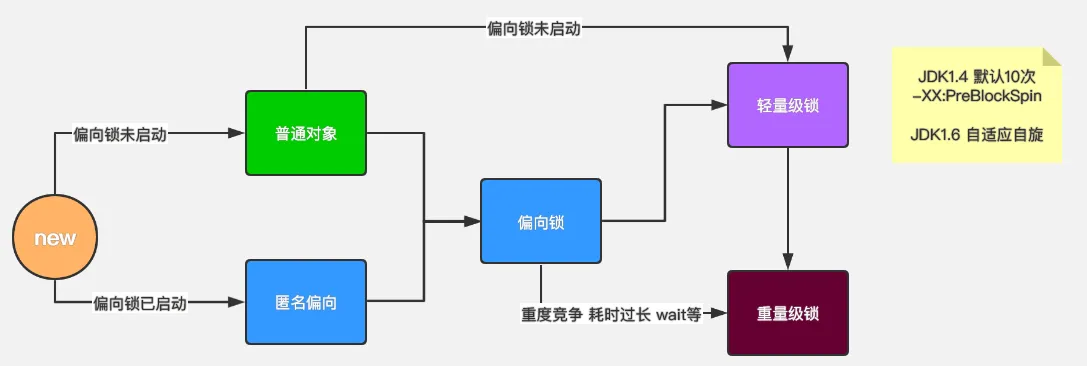
在 jdk1.6 之后 Java 官方对从 JVM 层面对 synchronized 较大优化,所以现在的 synchronized 锁效率也优化得很不错了,Jdk1.6 之后,为了减少获得锁和释放锁所带来的性能消耗,引入了偏向锁和轻量级锁,增加了锁升级的过程,由无锁->偏向锁->自旋锁->重量级锁
为什么会有这样的一个过程呢? 这是因为在多线程环境下,锁的升级过程可以降低系统的总体开销。不同类型的锁对系统资源的消耗和处理速度是有很大差异的。偏向锁、轻量级锁以及重量级锁,它们的复杂度和开销是逐渐增加的,但同时,能够处理的并发竞争程度也在增加。
增加锁升级的过程主要是减少用户态到核心态的切换,提高锁的效率,从 jvm 层面优化锁(图源:深入理解Java虚拟机:JVM高级特性与最佳实践(第2版))
偏向锁简介
在实际场景中,如果一个同步块(或方法)没有多个线程竞争,而且总是由同一个线程多次重入获取锁,如果每次还有阻塞线程,唤醒CPU从用户态转为核心态,那么对于CPU是一种资源的浪费,为了解决这类问题,就引入了偏向锁的概念。
偏向锁 偏向锁的主要思想是,如果一个线程已经获得了某个锁,那么当它再次请求同一锁时,不需要再进行额外的同步操作。在没有竞争的情况下,第一次获取偏向锁的线程可以直接进入方法,不需要执行同步操作。偏向锁会记住上一次成功获取自己的线程,如果这个线程再次请求锁,将会快速通过。如果另一个线程请求该锁,偏向锁就会被撤销,转换为一种更重的锁,如轻量级锁或者重量级锁。这种锁策略在只有一个主要线程访问数据结构的情况下效果最好,例如在实例初始化或者私有字段访问等场景。它主要通过避免无意义的竞争来提高性能。
偏向锁的缺点:如果有多个线程交替获得锁,那么偏向锁可能会增加额外的系统开销,因为它需要在每次锁所有权变更时撤销并重新偏向。因此,偏向锁并不适用于所有情况。
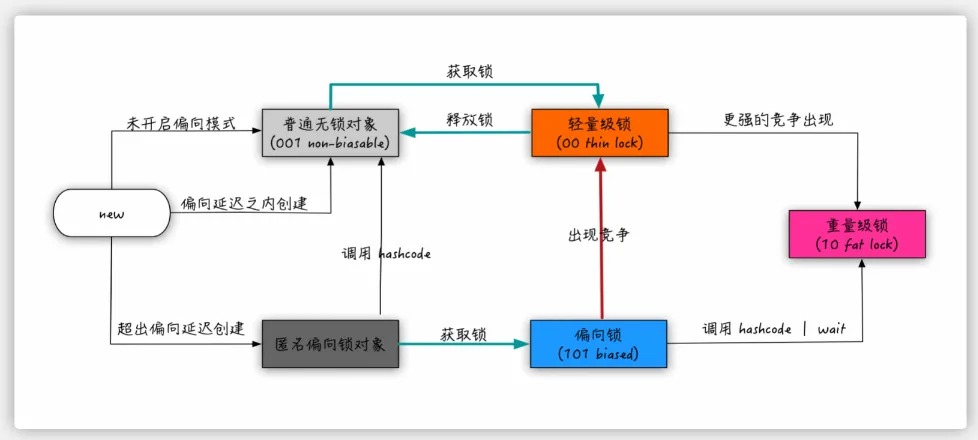
核心原理是:如果不存在线程竞争的一个线程获得了锁,那么锁就进入偏向状态,此时Mark Word的结构变为偏向锁结构,锁对象的锁标志位(lock)被改为01,偏向标志位(biased_lock)被改为1,然后线程的ID记录在锁对象的Mark Word中(使用CAS操作完成)。以后该线程获取锁时判断一下线程ID和标志位,就可以直接进入同步块,连CAS操作都不需要,这样就省去了大量有关锁申请的操作,从而也就提升了程序的性能。
image-20220710203331089

轻量级锁简介
轻量锁存在的目的是尽可能不动用操作系统层面的互斥锁,因为其性能比较差。线程的阻塞和唤醒需要CPU从用户态转为核心态,频繁地阻塞和唤醒对CPU来说是一件负担很重的工作。同时我们可以发现,很多对象锁的锁定状态只会持续很短的一段时间,例如整数的自加操作,在很短的时间内阻塞并唤醒线程显然不值得,为此引入了轻量级锁。轻量级锁是一种自旋锁,因为JVM本身就是一个应用,所以希望在应用层面上通过自旋解决线程同步问题。
自旋锁(Spinlock)是一种简单的同步原语,常见于多线程编程和操作系统内核设计。当一个线程尝试获取一个已经被其他线程占用的自旋锁时,该线程会进入一个称为自旋(Spinning)的忙等(busy-wait)状态,也就是反复检查锁是否可用,而不是让出其执行上下文(即进行上下文切换)。 自旋的情况通常发生在以下两种情况:
- 当锁已经被其他线程占用,且预计该线程将很快释放锁时,等待线程会选择自旋而非上下文切换。因为上下文切换本身有一定的开销,如果锁的占用时间非常短,那么自旋可能更有效率。
- 在多处理器或多核心的系统中,等待的线程可能在另一个处理器或核心上自旋,而锁的拥有者在另一个处理器或核心上运行。在这种情况下,自旋可以使等待的线程迅速获取到锁,而无需进程调度和上下文切换。
轻量级锁的执行过程:在抢锁线程进入临界区之前,如果内置锁(临界区的同步对象)没有被锁定,JVM首先将在抢锁线程的栈帧中建立一个锁记录(Lock Record),用于存储对象目前Mark Word的拷贝,这时的线程堆栈与内置锁对象头大致如图
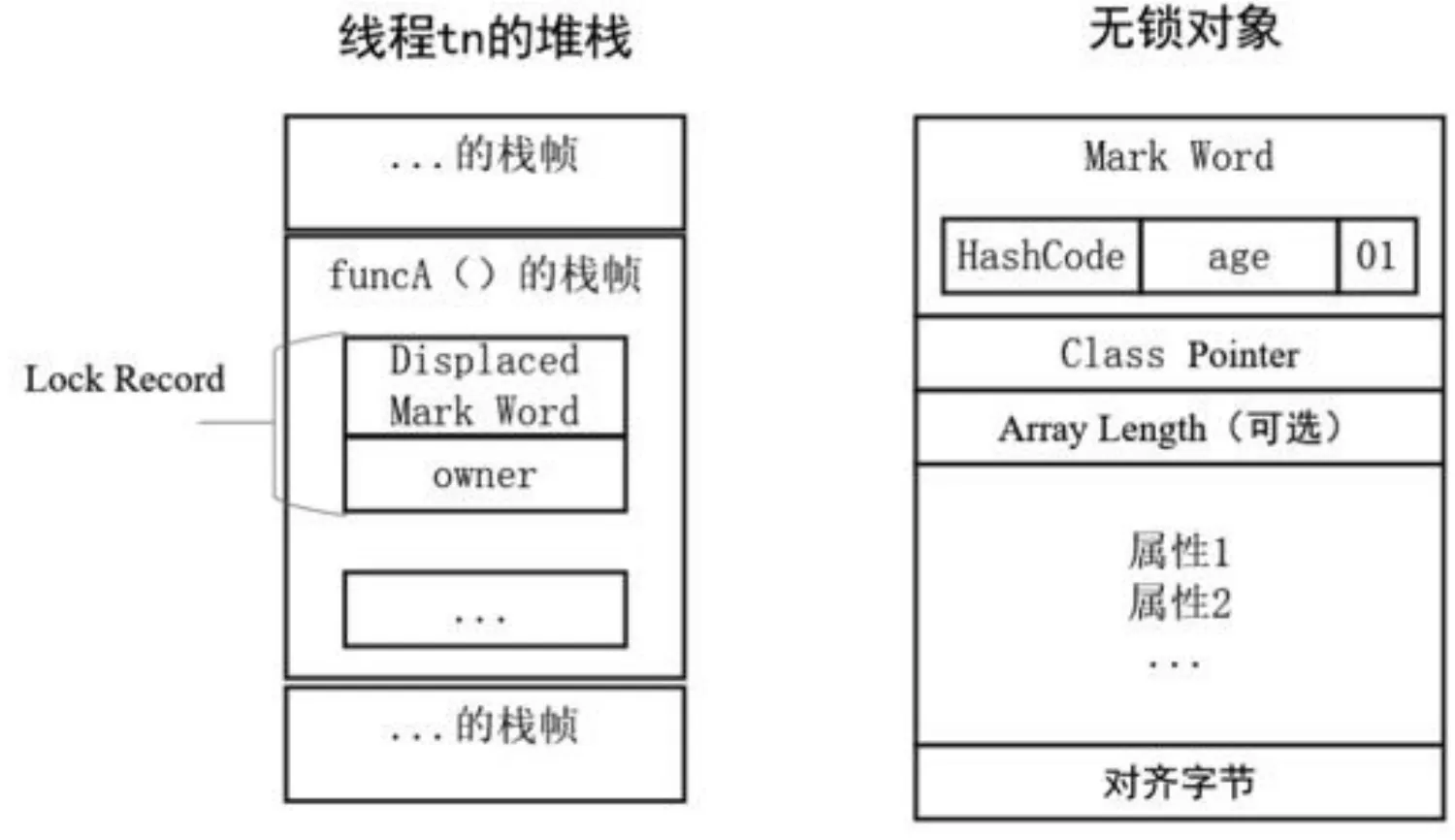
然后抢锁线程将使用CAS自旋操作,尝试将内置锁对象头的Mark Word的ptr_to_lock_record(锁记录指针)更新为抢锁线程栈帧中锁记录的地址,如果这个更新执行成功了,这个线程就拥有了这个对象锁。然后JVM将Mark Word中的lock标记位改为00(轻量级锁标志),即表示该对象处于轻量级锁状态。抢锁成功之后,JVM会将Mark Word中原来的锁对象信息(如哈希码等)保存在抢锁线程锁记录的Displaced Mark Word(可以理解为放错地方的Mark Word)字段中,再将抢锁线程中锁记录的owner指针指向锁对象。
在轻量级锁抢占成功之后,锁记录和对象头的状态如图
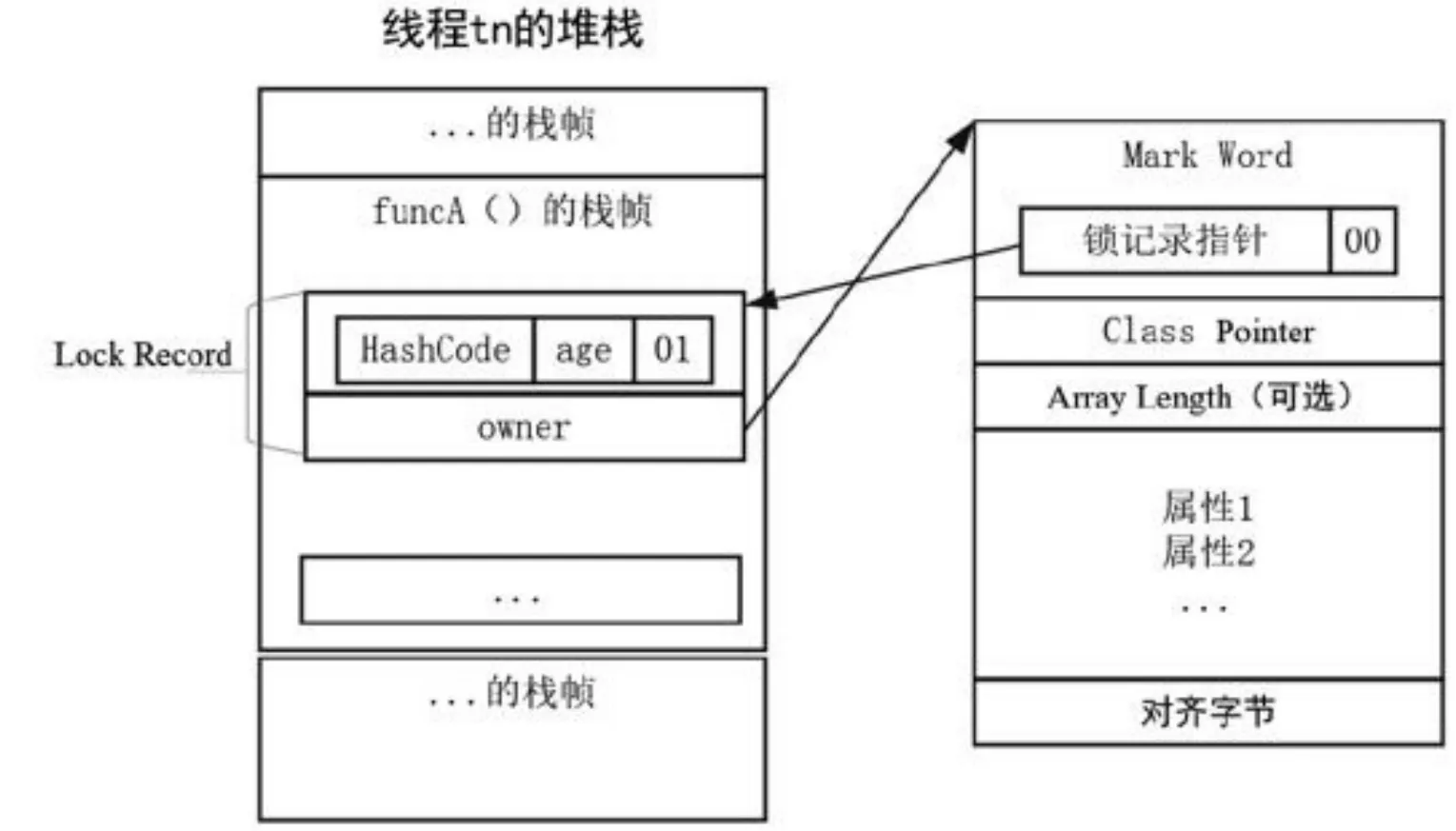
锁记录是线程私有的,每个线程都有自己的一份锁记录,在创建完锁记录后,会将内置锁对象的Mark Word复制到锁记录的Displaced Mark Word字段。这是为什么呢?因为内置锁对象的Mark Word的结构会有所变化,Mark Word将会出现一个指向锁记录的指针,而不再存着无锁状态下的锁对象哈希码等信息,所以必须将这些信息暂存起来,供后面在锁释放时使用
重量级锁简介
JVM中每个对象都会有一个监视器,监视器和对象一起创建、销毁。监视器相当于一个用来监视这些线程进入的特殊房间,其义务是保证(同一时间)只有一个线程可以访问被保护的临界区代码块。
本质上,监视器是一种同步工具,也可以说是一种同步机制,主要特点是:
(1)同步。监视器所保护的临界区代码是互斥地执行的。一个监视器是一个运行许可,任一线程进入临界区代码都需要获得这个许可,离开时把许可归还。
(2)协作。监视器提供Signal机制,允许正持有许可的线程暂时放弃许可进入阻塞等待状态,等待其他线程发送Signal去唤醒;其他拥有许可的线程可以发送Signal,唤醒正在阻塞等待的线程,让它可以重新获得许可并启动执行。
谈谈 synchronized 和 ReentrantLock 的区别
两者都是可重入锁
“可重入锁” 指的是自己可以再次获取自己的内部锁。比如一个线程获得了某个对象的锁,此时这个对象锁还没有释放,当其再次想要获取这个对象的锁的时候还是可以获取的,如果是不可重入锁的话,就会造成死锁。同一个线程每次获取锁,锁的计数器都自增 1,所以要等到锁的计数器下降为 0 时才能释放锁。
帮助大家理解下为什么说是不可重入锁的话会导致自锁,举个🌰,如果锁不是可重入的,那么当一个线程持有锁并在执行代码块时,另一个线程试图获取该锁将会被阻塞。如果此时第一个线程试图再次获取该锁,由于该锁不是可重入的,因此它将被阻塞,直到第二个线程释放锁。这就导致了死锁的情况,因为两个线程都在等待对方释放锁。 举一反三:如果有两个线程竞争资源,如果第一个线程占有了资源,第二个线程要去占有资源则会自旋,等待第一个线程,但是现在第一个线程想再次获得这个资源发现这个资源还是被自己占用就会陷入死锁状态。
如果是不可重入锁的代码说明:
public class DeadlockExample {
private final Object lock = new Object();
public void methodA() {
synchronized(lock) {
// do something
methodB();
}
}
public void methodB() {
synchronized(lock) {
// do something else
}
}
}
在这个示例代码中,如果一个线程调用methodA()方法获取了锁,它将持有锁并调用methodB()方法。在methodB()方法中,该线程又试图获取同一个锁,由于该锁不可重入,因此它将被阻塞。如果此时另一个线程尝试获取锁并调用methodA()方法,它也将被阻塞,因为该锁已经被第一个线程持有并且不会被释放。这就导致了死锁的情况。
synchronized 依赖于 JVM 而 ReentrantLock 依赖于 API
synchronized 是依赖于 JVM 实现的,前面我们也讲到了 虚拟机团队在 JDK1.6 为 synchronized 关键字进行了很多优化,但是这些优化都是在虚拟机层面实现的,并没有直接暴露给我们。ReentrantLock 是 JDK 层面实现的(也就是 API 层面,需要 lock() 和 unlock() 方法配合 try/finally 语句块来完成),所以我们可以通过查看它的源代码,来看它是如何实现的。
ReentrantLock 比 synchronized 增加了一些高级功能
相比 synchronized,ReentrantLock增加了一些高级功能。主要来说主要有三点:
- 等待可中断 :
ReentrantLock提供了一种能够中断等待锁的线程的机制,通过lock.lockInterruptibly()来实现这个机制。也就是说正在等待的线程可以选择放弃等待,改为处理其他事情。而 synchronized 不支持中断。 - 可实现公平锁 :
ReentrantLock可以指定是公平锁还是非公平锁。而synchronized只能是非公平锁。所谓的公平锁就是先等待的线程先获得锁。ReentrantLock默认情况是非公平的,可以通过ReentrantLock类的ReentrantLock(boolean fair)构造方法来制定是否是公平的。 - 可实现选择性通知(锁可以绑定多个条件):
synchronized关键字与wait()和notify()/notifyAll()方法相结合可以实现等待/通知机制。ReentrantLock类当然也可以实现,但是需要借助于Condition接口与newCondition()方法。
Condition是 JDK1.5 之后才有的,它具有很好的灵活性,比如可以实现多路通知功能也就是在一个Lock对象中可以创建多个Condition实例(即对象监视器),线程对象可以注册在指定的Condition中,从而可以有选择性的进行线程通知,在调度线程上更加灵活。 在使用notify()/notifyAll()方法进行通知时,被通知的线程是由 JVM 选择的,用ReentrantLock类结合Condition实例可以实现“选择性通知” ,这个功能非常重要,而且是 Condition 接口默认提供的。而synchronized关键字就相当于整个 Lock 对象中只有一个Condition实例,所有的线程都注册在它一个身上。如果执行notifyAll()方法的话就会通知所有处于等待状态的线程这样会造成很大的效率问题,而Condition实例的signalAll()方法 只会唤醒注册在该Condition实例中的所有等待线程。
如果你想使用上述功能,那么选择 ReentrantLock 是一个不错的选择。性能已不是选择标准。当然ReentrantLock并不是比较synchronized就是那么优秀,代码复杂度上:使用 ReentrantLock 需要手动实现加锁和解锁,增加了代码的复杂性。而使用 synchronized 只需要在方法或代码块前加关键字即可。性能上:尽管 ReentrantLock 提供了很多高级功能,但在某些场景下,synchronized 的性能可能更好。这是因为 JVM 对 synchronized 的实现进行了很多优化,如偏向锁、轻量级锁等。
⭐ThreadLocal 原理
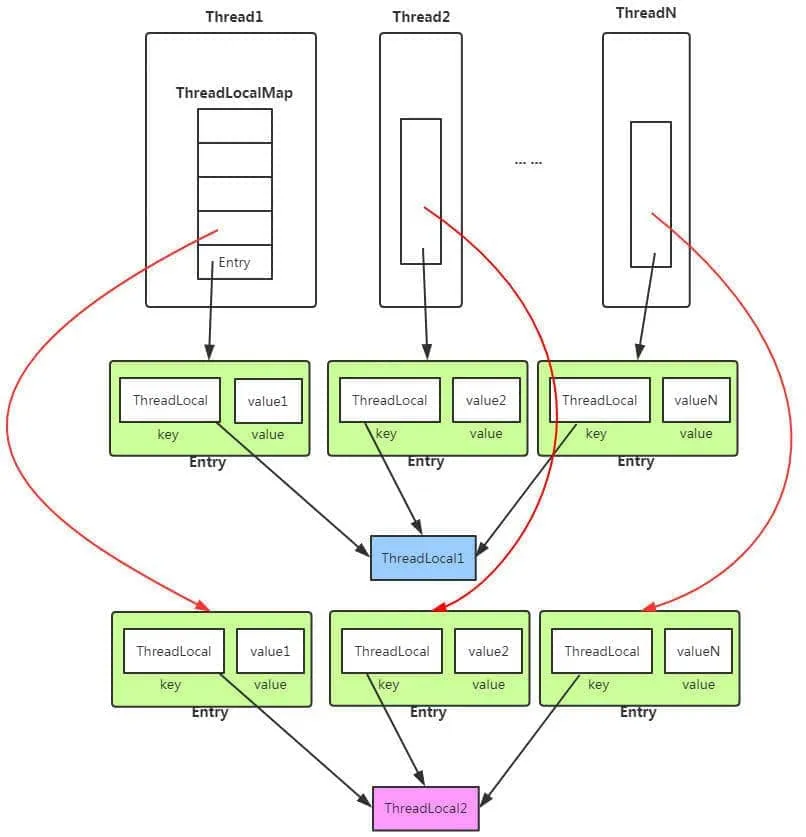
如果想实现每一个线程都有自己的专属本地变量该如何解决呢? JDK 中提供的 ThreadLocal类正是为了解决这样的问题。 ThreadLocal类主要解决的就是让每个线程绑定自己的值,可以将 ThreadLocal类形象的比喻成存放数据的盒子,盒子中可以存储每个线程的私有数据。
下面是ThreadLocal的源码:
public class Thread implements Runnable {
//......
//与此线程有关的ThreadLocal值。由ThreadLocal类维护
ThreadLocal.ThreadLocalMap threadLocals = null;
//与此线程有关的InheritableThreadLocal值。由InheritableThreadLocal类维护
ThreadLocal.ThreadLocalMap inheritableThreadLocals = null;
//......
}
可以看出 最终的变量是放在了当前线程的 ThreadLocalMap 中,并不是存在 ThreadLocal 上,ThreadLocal 可以理解为只是 ThreadLocalMap的封装,传递了变量值。 ThrealLocal 类中可以通过 Thread.currentThread()获取到当前线程对象后,直接通过 getMap(Thread t)可以访问到该线程的 ThreadLocalMap对象。
每个 Thread中都具备一个 ThreadLocalMap,而 ThreadLocalMap可以存储以 ThreadLocal为 key ,Object 对象为 value 的键值对。
注:
ThreadLocalMap是ThreadLocal的静态内部类。
ThreadLocal的key为什么设计成弱引用
弱引用,与强引用不同的是,只要垃圾回收机制一运行,不管JVM的内存空间是否足够,都会回收被弱引用关联的对象。在Java中,提供了WeakReference类来实现弱引用。
static class ThreadLocalMap {
/**
* The entries in this hash map extend WeakReference, using
* its main ref field as the key (which is always a
* ThreadLocal object). Note that null keys (i.e. entry.get()
* == null) mean that the key is no longer referenced, so the
* entry can be expunged from table. Such entries are referred to
* as "stale entries" in the code that follows.
*/
static class Entry extends WeakReference<ThreadLocal<?>> {
/** The value associated with this ThreadLocal. */
Object value;
Entry(ThreadLocal<?> k, Object v) {
super(k);
value = v;
}
}
...
}
那么,为什么ThreadLocal需要使用弱引用来作为key呢?这主要是因为ThreadLocal有一个特性,即每个Thread都会持有一个ThreadLocalMap,而ThreadLocalMap中存放着ThreadLocal作为key和对应用户数据作为value的键值对。在这种设计下,如果ThreadLocal的key是强引用,那么只要Thread还在,那么ThreadLocal就不会被垃圾回收,即使你已经没有任何强引用指向ThreadLocal对象。这就可能导致你的用户数据无法被垃圾回收,从而产生内存泄漏。
但是如果ThreadLocal的key是弱引用,一旦你的代码里没有强引用指向ThreadLocal对象,ThreadLocal就可能被垃圾回收,从而使得ThreadLocalMap中的Entry的key变为null,这时候,ThreadLocalMap的get、set、remove等方法都会清理掉这些key为null的Entry,从而使得用户数据得以被垃圾回收。
总的来说,ThreadLocal的key使用弱引用是为了更好的控制内存的使用,防止因为使用ThreadLocal而导致的内存泄漏问题。
ThreadLocal为什么会导致内存泄露(简化版):
ThreadLocalMap 中使用的 key 为 ThreadLocal 的弱引用,而 value 是强引用。所以,如果 ThreadLocal 没有被外部强引用的情况下,在垃圾回收的时候,key 会被清理掉,而 value 不会被清理掉。
ThreadLocal为什么不用强引用?
ThreadLocal在Java中是一种常用的线程隔离技术,它可以为每一个线程提供一个独立的变量副本,从而实现线程安全。但是,ThreadLocal并不使用强引用来存储这些变量副本,而是使用弱引用。这是出于以下几个原因:
- 内存泄漏问题:如果
ThreadLocal使用强引用来存储变量副本,那么只要线程本身不结束,这些副本就不会被垃圾回收机制回收。这可能会导致内存泄漏问题,尤其是在长时间运行的线程和大量使用ThreadLocal的情况下。 - 线程结束时的清理:当线程结束时,所有由该线程持有的
ThreadLocal变量副本应该被清理。如果ThreadLocal使用强引用,那么即使线程结束,这些副本仍然可能存在,除非显式地清理它们。而使用弱引用则可以确保线程结束时,这些副本会被自动清理。 - 灵活的生命周期管理:弱引用允许更灵活的生命周期管理。
ThreadLocal中的变量副本只要不再被线程引用,就可以被垃圾回收机制回收。这可以有效防止内存过载,并允许更高效的资源利用。
虽然ThreadLocal使用弱引用可以带来以上好处,但也有一些需要注意的地方。比如,你需要确保在线程生命周期内,持有到ThreadLocal对象的强引用,否则这个ThreadLocal对象可能会提前被回收。另外,即使ThreadLocal使用弱引用,也不能完全防止内存泄漏。如果线程结束后,没有清理ThreadLocal的值,那么这些值将会保留在线程的ThreadLocalMap中,导致内存泄漏。所以,使用ThreadLocal时,最好的做法是在不再需要使用变量副本时,显式地清理它。
ThreadLocal实现线程本地存储的核心在于每个Thread都维护了一个ThreadLocalMap,ThreadLocalMap实际上是一个特殊设计的哈希映射,其键为ThreadLocal对象(使用弱引用), 值为线程局部变量。
ThreadLocalMap的设计使得ThreadLocal对象可以在不被线程引用的情况下被垃圾回收器回收。这是因为ThreadLocalMap的键使用了ThreadLocal的弱引用。弱引用是一种弱度小于强引用但大于软引用和弱引用的引用,只要垃圾回收器发现了弱引用,不论系统内存是否足够,都会回收掉只被弱引用关联的对象。
当ThreadLocal对象被回收后,其对应的值在ThreadLocalMap中的实体(Entry)会变为null,这是一个空的引用。因此,ThreadLocalMap还需要提供一种机制来清理这些没有键的Entry,否则这些Entry的值可能会造成内存泄露。这个机制是在ThreadLocal的get(), set() 和 remove() 方法被调用时,通过调用ThreadLocalMap的expungeStaleEntries()方法来清理无效的Entry。(ps. 这里看源码调用链是这样的:get() -> map.getEntry(this) -> getEntryAfterMiss(key, i, e) -> expungeStaleEntry(i))
// 清理过期的ThreadLocal变量
private void expungeStaleEntries() {
Entry[] tab = table;
int len = tab.length;
// 遍历数组中的每一个元素
for (int j = 0; j < len; j++) {
Entry e = tab[j];
// 如果该元素存在,但其对应的ThreadLocal变量已经被回收,则进行清理
if (e != null && e.get() == null)
expungeStaleEntry(j);
}
}
// 清理staleSlot位置上的元素
private int expungeStaleEntry(int staleSlot) {
Entry[] tab = table;
int len = tab.length;
// 清除staleSlot位置上的元素
tab[staleSlot].value = null;
tab[staleSlot] = null;
size--;
// 重新哈希,直到遇到空元素
Entry e;
int i;
for (i = nextIndex(staleSlot, len);
(e = tab[i]) != null;
i = nextIndex(i, len)) {
// 获取元素对应的ThreadLocal变量
ThreadLocal<?> k = e.get();
if (k == null) {
// 如果ThreadLocal变量已经被回收,则清除该元素
e.value = null;
tab[i] = null;
size--;
} else {
// 计算新的哈希值
int h = k.threadLocalHashCode & (len - 1);
if (h != i) {
// 如果哈希值不等于当前位置,则将该元素拷贝到新位置
tab[i] = null;
// Unlike Knuth 6.4 Algorithm R, we must scan until
// null because multiple entries could have been stale.
while (tab[h] != null)
h = nextIndex(h, len);
tab[h] = e;
}
}
}
return i;
}
然而,尽管ThreadLocalMap提供了自动清理无效Entry的机制,但是如果我们不再使用ThreadLocal对象,但是又没有显式地调用ThreadLocal的remove()方法,那么ThreadLocal的值是不会被自动清理的,因为expungeStaleEntries()方法只有在ThreadLocal的get(), set() 和 remove() 方法被调用时才会执行。这就可能导致内存泄露,尤其是在长时间运行的线程中。因此,我们在使用ThreadLocal时,通常需要手动调用ThreadLocal的remove()方法来清理不再使用的值。
实现 Runnable 接口和 Callable 接口的区别
继承Thread类或者实现Runnable接口这两种方式来创建线程类,但是这两种方式有一个共同的缺陷:不能获取异步执行的结果。Callable接口类似于Runnable。不同的是,Runnable的唯一抽象方法run()没有返回值,也没有受检异常的异常声明。比较而言,Callable接口的call()有返回值,并且声明了受检异常,其功能更强大一些。
- 返回值:Runnable 接口的 run() 方法没有返回值,而 Callable 接口的 call() 方法有返回值。
- 受检异常:Runnable 接口的 run() 方法不会抛出受检异常,而 Callable 接口的 call() 方法会抛出受检异常。
- 使用方式:Runnable 接口通常用于执行没有返回值的异步任务,而 Callable 接口通常用于执行有返回值的异步任务。
Runnable自 Java 1.0 以来一直存在,但 Callable仅在 Java 1.5 中引入,目的就是为了来处理 Runnable不支持的用例。Runnable 接口 不会返回结果或抛出检查异常,但是 Callable 接口 可以。所以,如果任务不需要返回结果或抛出异常推荐使用 Runnable 接口 ,这样代码看起来会更加简洁。
使用 Runnable 接口创建线程:
public class MyRunnable implements Runnable {
@Override
public void run() {
// 执行异步任务
System.out.println("MyRunnable is running");
}
}
// 创建线程
Thread thread = new Thread(new MyRunnable());
// 启动线程
thread.start();
使用 Callable 接口创建线程:
public class MyCallable implements Callable<String> {
@Override
public String call() throws Exception {
// 执行异步任务并返回结果
return "MyCallable is running";
}
}
// 创建线程
ExecutorService executor = Executors.newSingleThreadExecutor();
Future<String> future = executor.submit(new MyCallable());
// 获取结果
String result = future.get();
System.out.println(result);
// 关闭线程池
executor.shutdown();
执行 execute()方法和 submit()方法的区别是什么呢?
execute()方法用于提交不需要返回值的任务,所以无法判断任务是否被线程池执行成功与否;submit()方法用于提交需要返回值的任务。线程池会返回一个Future类型的对象,通过这个Future对象可以判断任务是否执行成功,并且可以通过Future的get()方法来获取返回值,get()方法会阻塞当前线程直到任务完成,而使用get(long timeout,TimeUnit unit)方法则会阻塞当前线程一段时间后立即返回,这时候有可能任务没有执行完。
Execute()源码
public void execute(Runnable command) {
...
}
submit大致源码
public Future<?> submit(Runnable task) {
if (task == null) throw new NullPointerException();
RunnableFuture<Void> ftask = newTaskFor(task, null);
execute(ftask);
return ftask;
}
protected <T> RunnableFuture<T> newTaskFor(Runnable runnable, T value) {
return new FutureTask<T>(runnable, value);
}
newTaskFor 方法返回了一个 FutureTask 对象。
🔥 如何创建线程池
《阿里巴巴 Java 开发手册》中强制线程池不允许使用 Executors 去创建,而是通过 ThreadPoolExecutor 的方式,这样的处理方式让写的同学更加明确线程池的运行规则,规避资源耗尽的风险
Executors 返回线程池对象的弊端如下:
- FixedThreadPool 和 SingleThreadExecutor : 允许请求的队列长度为 Integer.MAX_VALUE ,可能堆积大量的请求,从而导致 OOM。
- CachedThreadPool 和 ScheduledThreadPool : 允许创建的线程数量为 Integer.MAX_VALUE ,可能会创建大量线程,从而导致 OOM。
源码:
/**
* 用给定的初始参数创建一个新的ThreadPoolExecutor。
*/
public ThreadPoolExecutor(int corePoolSize, //线程池的核心线程数量
int maximumPoolSize, //线程池的最大线程数
long keepAliveTime, //当线程数大于核心线程数时,多余的空闲线程存活的最长时间
TimeUnit unit, //时间单位
BlockingQueue<Runnable> workQueue, //任务队列,用来储存等待执行任务的队列
ThreadFactory threadFactory, //线程工厂,用来创建线程,一般默认即可
RejectedExecutionHandler handler //拒绝策略,当提交的任务过多而不能及时处理时,我们可以定制策略来处理任务
) {
if (corePoolSize < 0 ||
maximumPoolSize <= 0 ||
maximumPoolSize < corePoolSize ||
keepAliveTime < 0)
throw new IllegalArgumentException();
if (workQueue == null || threadFactory == null || handler == null)
throw new NullPointerException();
this.corePoolSize = corePoolSize;
this.maximumPoolSize = maximumPoolSize;
this.workQueue = workQueue;
this.keepAliveTime = unit.toNanos(keepAliveTime);
this.threadFactory = threadFactory;
this.handler = handler;
}
Java 的 ThreadPoolExecutor 提供了几种 BlockingQueue 实现作为参数:
- ArrayBlockingQueue:基于数组的先进先出队列, FIFO 规则。有界队列,满时会阻塞添加操作。
- LinkedBlockingQueue:基于链表的先进先出队列,FIFO 规则。可选的有界队列,但默认是无界的。
- SynchronousQueue:不存储元素的阻塞队列。每个插入操作都必须等待一个移除操作,反之亦然。
- PriorityBlockingQueue:具有优先级的无界阻塞队列。优先级采用自然顺序或 Comparator 顺序。
- LinkedTransferQueue:由链表结构组成的无界阻塞 FIFO 队列。
- DelayQueue:一个无界的阻塞队列,用于放置实现 Delayed 接口的元素。
- LinkedBlockingDeque:基于链表的双向阻塞队列,可以用作阻塞队列的 FIFO 和 LIFO。
常见的场景:
- LinkedBlockingQueue:高吞吐量且公平的阻塞队列,一般作为 ThreadPoolExecutor 的任务队列使用。
- ArrayBlockingQueue:有界阻塞队列,可以指定最大容量,超过容量时阻塞添加操作,保证不会内存溢出。
- SynchronousQueue:没有存储空间的阻塞队列,用于传递性场景,比如一个线程提交任务,另一个线程立即消费的场景。
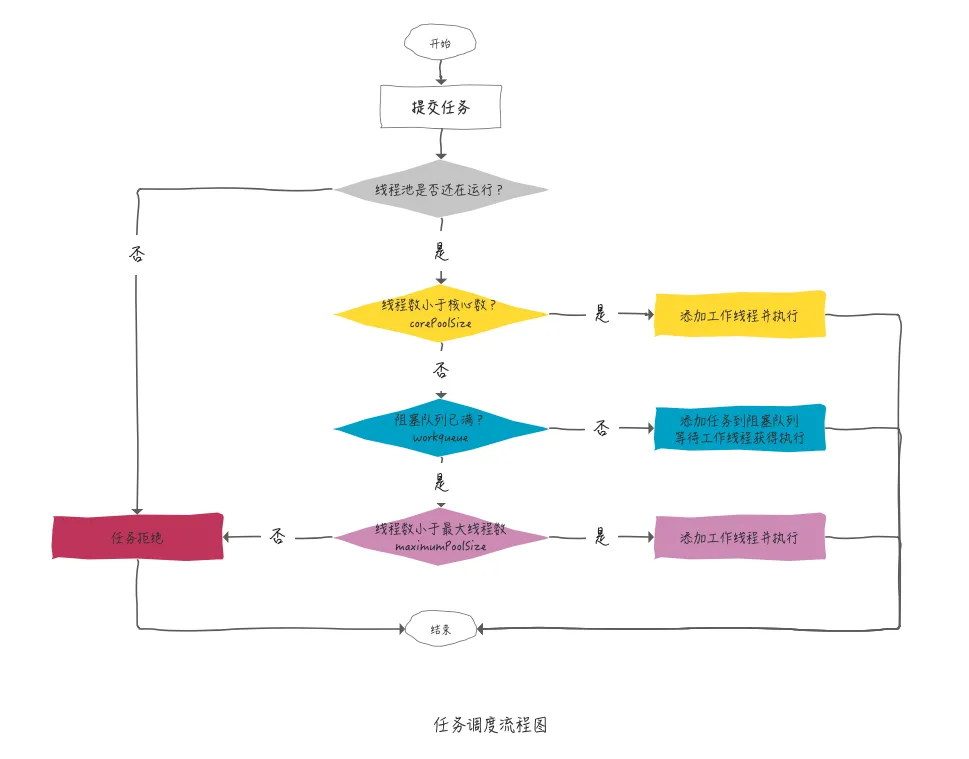
ThreadPoolExecutor 3 个最重要的参数:
corePoolSize : 核心线程数定义了最小可以同时运行的线程数量。
maximumPoolSize : 当队列中存放的任务达到队列容量的时候,当前可以同时运行的线程数量变为最大线程数。
workQueue: 当新任务来的时候会先判断当前运行的线程数量是否达到核心线程数,如果达到的话,新任务就会被存放在队列中。
ThreadPoolExecutor 其他常见参数
keepAliveTime: 当线程池中的线程数量大于 `corePoolSize` 的时候,如果这时没有新的任务提交,核心线程外的线程不会立即销毁,而是会等待,直到等待的时间超过了 `keepAliveTime`才会被回收销毁;
unit: 参数的时间单位
threadFactory: executor 创建新线程的时候会用到
handler: 拒绝策略
1. `ThreadPoolExecutor.AbortPolicy`: 抛出 RejectedExecutionException来拒绝新任务的处理。
2. `ThreadPoolExecutor.CallerRunsPolicy`: 提交任务的线程自己去执行该任务
3. `ThreadPoolExecutor.DiscardPolicy`: 不处理新任务,直接丢弃掉。
4. `ThreadPoolExecutor.DiscardOldestPolicy`: 此策略将丢弃最早的未处理的任务请求。
这里RejectedExecutionHandler面试官可能还会问一个问题:是否可以实现自定义拒绝策略?
Java中的ThreadPoolExecutor允许你自定义拒绝策略。RejectedExecutionHandler是一个接口,你可以实现这个接口来定义自己的拒绝策略。下面是一个简单的自定义拒绝策略示例:
首先,我们创建一个实现RejectedExecutionHandler接口的类:
import java.util.concurrent.RejectedExecutionHandler;
import java.util.concurrent.ThreadPoolExecutor;
public class CustomRejectedExecutionHandler implements RejectedExecutionHandler {
@Override
public void rejectedExecution(Runnable r, ThreadPoolExecutor executor) {
// 在这里实现你的自定义拒绝策略
System.out.println("自定义拒绝策略:任务 " + r.toString() + " 被拒绝");
}
}
接下来,我们创建一个ThreadPoolExecutor实例,并将自定义的拒绝策略作为参数传递:
import java.util.concurrent.ArrayBlockingQueue;
import java.util.concurrent.ThreadPoolExecutor;
import java.util.concurrent.TimeUnit;
public class CustomRejectedExecutionHandlerExample {
public static void main(String[] args) {
int corePoolSize = 2;
int maximumPoolSize = 4;
long keepAliveTime = 10;
TimeUnit unit = TimeUnit.SECONDS;
ArrayBlockingQueue<Runnable> workQueue = new ArrayBlockingQueue<>(2);
CustomRejectedExecutionHandler rejectionHandler = new CustomRejectedExecutionHandler();
ThreadPoolExecutor executor = new ThreadPoolExecutor(corePoolSize, maximumPoolSize, keepAliveTime, unit, workQueue, rejectionHandler);
// 添加任务到线程池
for (int i = 0; i < 10; i++) {
Runnable task = () -> {
System.out.println("执行任务: " + Thread.currentThread().getName());
};
executor.execute(task);
}
// 关闭线程池
executor.shutdown();
}
}
在这个例子中,我们创建了一个具有自定义拒绝策略的ThreadPoolExecutor。当线程池无法处理更多任务时,它将执行我们在CustomRejectedExecutionHandler类中定义的拒绝策略。在这个例子里,我们只是简单地打印出了被拒绝的任务信息。你可以根据需要实现更复杂的拒绝策略。
JUC 包中的原子类是哪 4 类?
基本类型
使用原子的方式更新基本类型
AtomicInteger:整型原子类AtomicLong:长整型原子类AtomicBoolean:布尔型原子类
数组类型
使用原子的方式更新数组里的某个元素
AtomicIntegerArray:整型数组原子类AtomicLongArray:长整型数组原子类AtomicReferenceArray:引用类型数组原子类
引用类型
AtomicReference:引用类型原子类AtomicStampedReference:原子更新带有版本号的引用类型。该类将整数值与引用关联起来,可用于解决原子的更新数据和数据的版本号,可以解决使用 CAS 进行原子更新时可能出现的 ABA 问题。AtomicMarkableReference:原子更新带有标记位的引用类型
对象的属性修改类型
AtomicIntegerFieldUpdater:原子更新整型字段的更新器AtomicLongFieldUpdater:原子更新长整型字段的更新器AtomicReferenceFieldUpdater:原子更新引用类型字段的更新器
能不能给我简单介绍一下 AtomicInteger 类
概述:当多个线程需要同时访问一个共享整数变量时,可能会遇到线程安全的问题。Java中的AtomicInteger类是一种线程安全的整数类,它可以保证多个线程同时访问时的原子性(atomicity)操作。原子性操作指的是一个操作要么全部执行成功,要么全部执行失败,不会出现部分执行的情况。
AtomicInteger类提供了一些方法来实现原子性操作,例如:
public final int get() //获取当前的值
public final int getAndSet(int newValue)//获取当前的值,并设置新的值
public final int getAndIncrement()//获取当前的值,并自增
public final int getAndDecrement() //获取当前的值,并自减
public final int getAndAdd(int delta) //获取当前的值,并加上预期的值
boolean compareAndSet(int expect, int update) //如果输入的数值等于预期值,则以原子方式将该值设置为输入值(update)
public final void lazySet(int newValue)//最终设置为newValue,使用 lazySet 设置之后可能导致其他线程在之后的一小段时间内还是可以读到旧的值。
此外,AtomicInteger类中的一些方法(如incrementAndGet()和decrementAndGet())是通过本地方法(native)来实现的。本地方法是指由Java程序调用的非Java代码,通常是由C、C++或ASM等语言编写的代码。本地方法可以直接访问底层操作系统的资源和硬件设备,因此可以提高程序的性能。
AtomicInteger 类主要利用 CAS (compare and swap) + volatile 和 native 方法来保证原子操作,从而避免 synchronized 的高开销,执行效率大为提升。
AtomicInteger 类的部分源码:
// setup to use Unsafe.compareAndSwapInt for updates(更新操作时提供“比较并替换”的作用)
private static final Unsafe unsafe = Unsafe.getUnsafe();
private static final long valueOffset;
static {
try {
valueOffset = unsafe.objectFieldOffset
(AtomicInteger.class.getDeclaredField("value"));
} catch (Exception ex) { throw new Error(ex); }
}
private volatile int value;
CAS 的原理是拿期望的值和原本的一个值作比较,如果相同则更新成新的值。UnSafe 类的 objectFieldOffset() 方法是一个本地方法,这个方法是用来拿到“原来的值”的内存地址,返回值是 valueOffset。另外 value 是一个 volatile 变量,在内存中可见,因此 JVM 可以保证任何时刻任何线程总能拿到该变量的最新值。
🔥 请你说一下自己对于 AQS 原理的理解
前提:LockSupport
Basic thread blocking primitives (原始) for creating locks and other synchronization (同步) classes.
This class associates, with each thread that uses it, a permit (in the sense of the Semaphore class). A call to park will return immediately if the permit is available, consuming it in the process; otherwise it may block. A call to unpark makes the permit available, if it was not already available. (Unlike with Semaphores (旗语) though, permits do not accumulate (积累) . There is at most one.)
简而言之就是wait/notify的加强版,常用的两个函数如下:
- park()
- unpark()
其他让线程阻塞唤醒的方法:
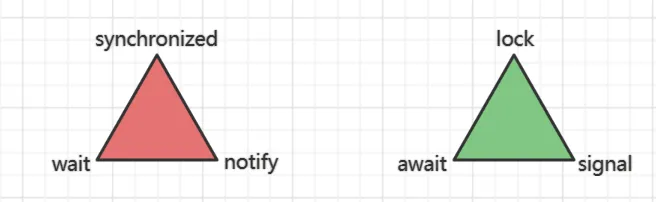
需要注意的是
- wait和notify必须要在synchronized代码块中否则会报错
- await和signal必须是在lock(例如ReentrantLock里面)才行,否则报错
LockSupport用来创建锁和其他同步类的基本线程阻塞原语。简而言之,当调用LockSupport.park时,表示当前线程将会等待,直至获得许可,当调用LockSupport.unpark时,必须把等待获得许可的线程作为参数进行传递,好让此线程继续运行。
public static void park() {
UNSAFE.park(false, 0L);
}
public static void park(Object blocker) {
Thread t = Thread.currentThread();
setBlocker(t, blocker);
UNSAFE.park(false, 0L);
setBlocker(t, null);
}
...
public static void unpark(Thread thread) {
if (thread != null)
UNSAFE.unpark(thread);
}
permit默认是0,所以一开始调用park()方法,当前线程就会阻塞,直到别的线程将当前线程的permit设置为1时,park方法会被唤醒,然后会将permit再次设置为0并返回。
unpark(Thread thread) - 唤醒处于阻塞状态的指定线程
调用unpark(thread)方法后,就会将thread线程的许可permit设置成1(注意多次调用unpark方法,不会累加,pemit值还是1)会自动唤醒thead线程,即之前阻塞中的LockSupport.park()方法会立即返回。
设计模式之模板方法
该小节参考了《秒懂设计模式》、《设计模式之禅》、《图解设计模式》
Define the skeleton of an algorithm in an operation,deferring some steps to subclasses.Template Method lets subclasses redefine certain steps of an algorithm without changing the algorithm's structure.(定义一个操作中的算法的框架,而将一些步骤延迟到子类中。使得子类可以不改变一个算法的结构即可重定义该算法的某些特定步骤。)
模板模式的关键在于:父类提供框架性的公共逻辑,子类提供个性化的定制逻辑。
模板方法模式确实非常简单,仅仅使用了Java的继承机制,但它是一个应用非常广泛的模式。其中,AbstractClass叫做抽象模板,它的方法分为两类:
基本方法
- 基本方法也叫做基本操作,是由子类实现的方法,并且在模板方法被调用。
模板方法
- 可以有一个或几个,一般是一个具体方法,也就是一个框架,实现对基本方法的调度,完成固定的逻辑。
注意 为了防止恶意的操作,一般模板方法都加上final关键字,不允许被覆写
代码示例
既然鲸、人类、蝙蝠都是动物,那么一定得具备动物最基本的生存技能,所以我们建模时要体现其“动”与“吃”这两种本能行为,缺一不可
定义一个行为(模板)
public abstract class Mammal {
public abstract void move( );
public abstract void eat( );
public final void live() {
move();
eat();
}
}
鲸鱼类
class Whale extends Mammal {
@Override
public void move() {
System.out.print("鲸在水里游着...");
}
@Override
public void eat() {
System . out. println("捕鱼吃。");
}
}
人类
class Human extends Mammal {
@Override
public void move() {
System.out.print("人类在路上开着车...");
}
@Override
public void eat() {
System. out. println("去公司挣钱吃饭。");
}
}
哺乳动物统一调用了通用的模板方法live(),以此作为生存法则就能很好地存活下去
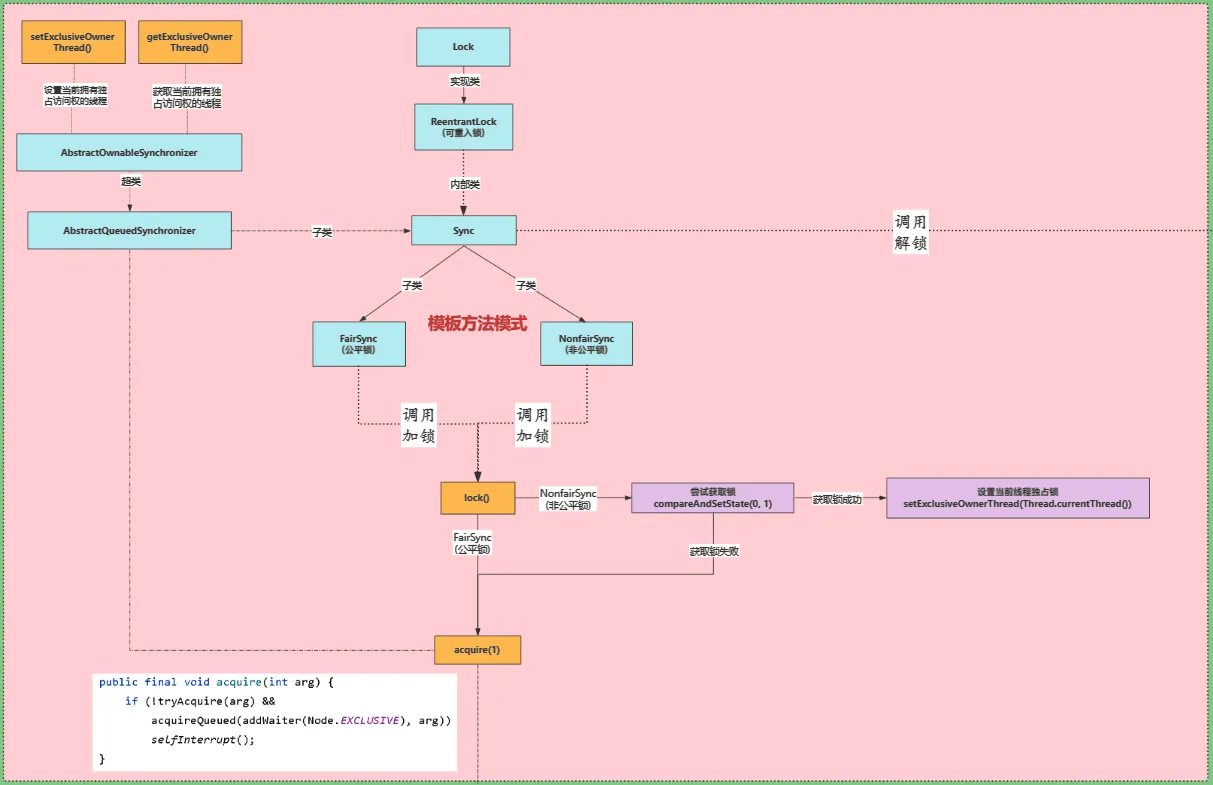
AQS的模板方法
加锁:
释放锁:
AQS概述
AQS为每个共享资源都设置一个共享资源锁,线程在需要访问共享资源时首先需要获取共享资源锁,如果获取到了共享资源锁,便可以在当前线程中使用该共享资源,如果获取不到,则将该线程放入线程等待队列,等待下一次资源调度,具体的流程如图。许多同步类的实现都依赖于AQS,例如常用的ReentrantLock、Semaphore和CountDownLatch。(图片来源于《offer来了》) 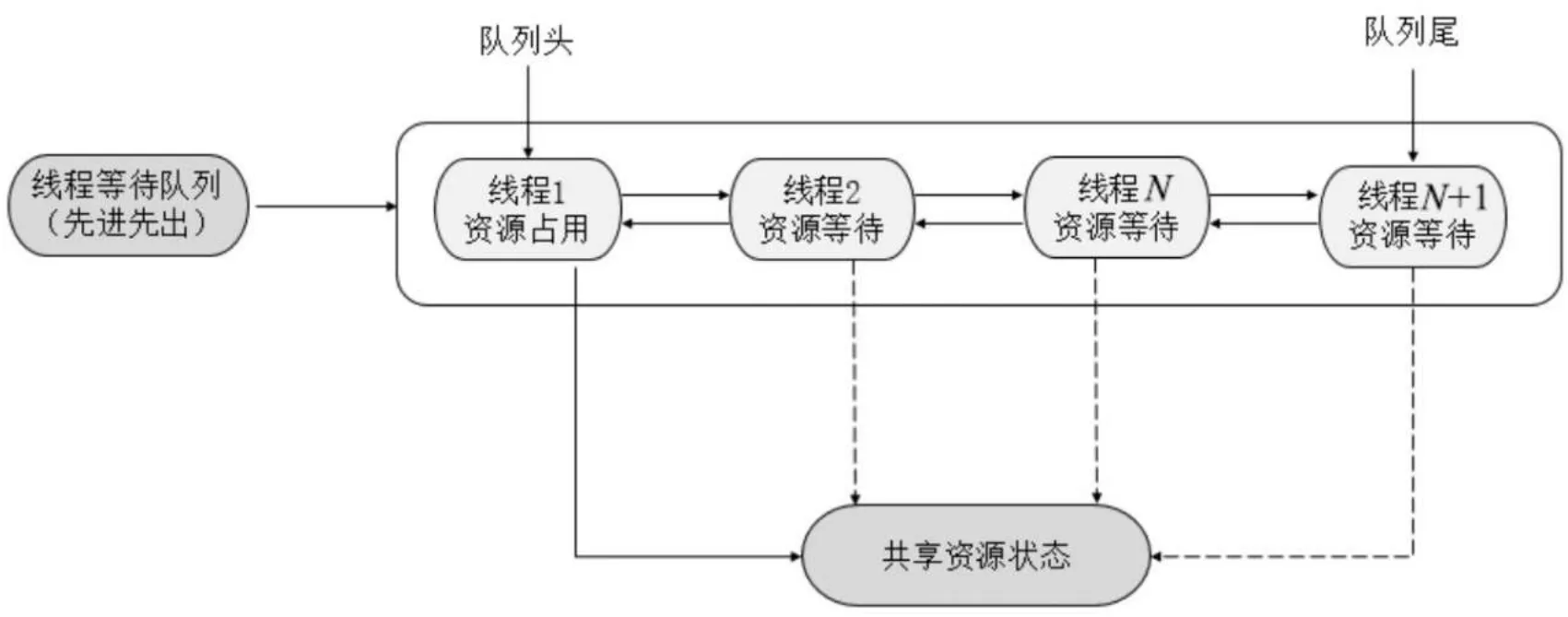
AQS,即AbstractQueuedSynchronizer 在我的理解中,AQS的主要原理可以分为以下几个部分:
- 状态(State): AQS中有一个volatile int state变量用来表示同步状态,初始值为0。当状态为0时,代表未锁定;当状态大于0时,代表已锁定。具体的状态值含义可以由子类来定义。例如,在ReentrantLock中,state表示重入的次数。
- 节点(Node): AQS使用Node来表示等待线程,每个Node都包含一个线程引用和状态标识。这些节点会被组织成一个双向链表。
- FIFO队列: 当一个线程尝试获取资源失败(比如试图获取一个已经被其他线程持有的锁),它会被AQS转化为一个Node节点,然后被放入到一个FIFO队列的尾部,直到有机会再次尝试获取资源。当线程成功获取到资源,其对应的Node将从队列中删除。
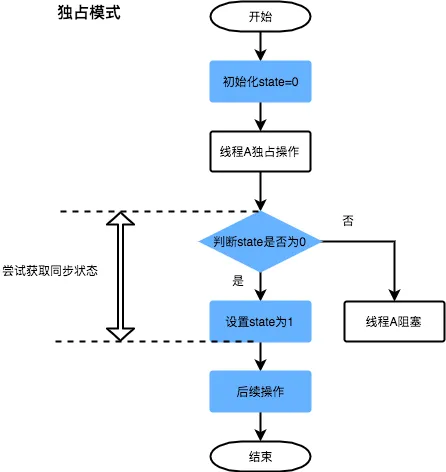
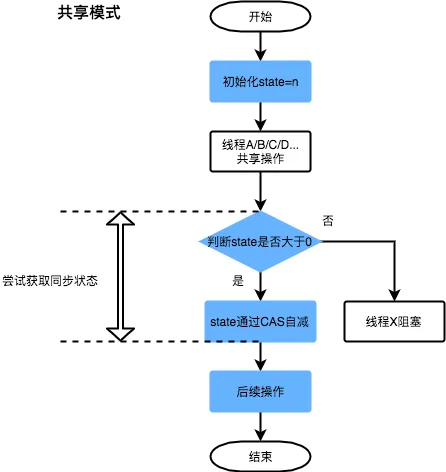
- 独占和共享模式: AQS支持两种模式:独占模式和共享模式。在独占模式下,每次只有一个线程能执行,其他的线程都需要等待;在共享模式下,多个线程可以同时执行。这两种模式由子类实现,并通过isHeldExclusively(), tryAcquire(), tryRelease()等方法实现。、
- 条件队列: 条件队列是一种阻塞队列,它与AQS的同步队列有所不同。当线程调用条件的await()方法后,线程会被放入到条件队列中,当其他线程调用signal()方法后,线程会从条件队列转移至同步队列,准备获取锁。
- 公平和非公平锁: 在AQS中,公平和非公平锁的区别在于获取锁的方式。公平锁遵循FIFO原则,按照线程请求的顺序来获取锁,而非公平锁则可能插队获取锁,这通常会带来更高的吞吐量。
AQS状态
state:状态 Abstract Queued Synchronizer维护了一个volatile int类型的变量,用于表示当前的同步状态。Volatile虽然不能保证操作的原子性,但是能保证当前变量state的可见性。state的访问方式有三种:getState()、setState()和compareAndSetState(),均是原子操作,其中,compareAndSetState的实现依赖于Unsafe的compareAndSwapInt()。具体的JDK代码实现如下:
// 返回同步状态的当前值。此操作具有volatile读取原子操作。
protected final long getState() {
return state;
}
// 设置同步状态的值。此操作具有volatile写入原子操作。
protected final void setState(long newState) {
state = newState;
}
//自动将同步状态设置为给定的更新状态值(如果当前状态值等于预期值)
//此操作的内存语义为volatile修饰的原子读写操作
protected final boolean compareAndSetState(long expect, long update) {
// See below for intrinsics setup to support this
return unsafe.compareAndSwapLong(this, stateOffset, expect, update);
}
AQS数据结构
CLH
AbstractQueuedSynchronizer类底层的数据结构是使用 CLH(Craig,Landin,and Hagersten)队列是一个虚拟的双向队列(虚拟的双向队列即不存在队列实例,仅存在结点之间的关联关系)。AQS是将每条请求共享资源的线程封装成一个CLH锁队列的一个结点(Node)来实现锁的分配。
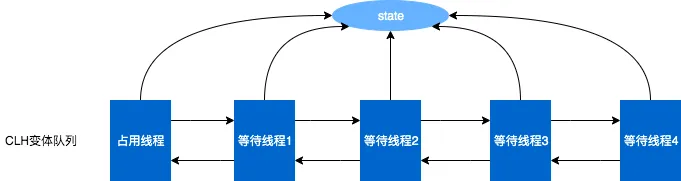
Node
Node即为上面CLH变体队列中的节点。

解释一下几个方法和属性值的含义:
| 方法和属性值 | 含义 |
|---|---|
| waitStatus | 当前节点在队列中的状态 |
| thread | 表示处于该节点的线程 |
| prev | 前驱指针 |
| predecessor | 返回前驱节点,没有的话抛出npe |
| nextWaiter | 指向下一个处于CONDITION状态的节点(由于本篇文章不讲述Condition Queue队列,这个指针不多介绍) |
| next | 后继指针 |
线程两种锁的模式:
| 模式 | 含义 |
|---|---|
| SHARED | 表示线程以共享的模式等待锁 |
| EXCLUSIVE | 表示线程正在以独占的方式等待锁 |
waitStatus有下面几个枚举值:
| 枚举 | 含义 |
|---|---|
| 0 | 当一个Node被初始化的时候的默认值 |
| CANCELLED | 为1,表示线程获取锁的请求已经取消了 |
| CONDITION | 为-2,表示节点在等待队列中,节点线程等待唤醒 |
| PROPAGATE | 为-3,当前线程处在SHARED情况下,该字段才会使用 |
| SIGNAL | 为-1,表示线程已经准备好了,就等资源释放了 |
AQS的资源的共享方式
AQS定义了两种资源共享方式:
- Exclusive(独享锁):只有一个线程能占有锁资源,如ReentrantLock。独享锁又可分为公平锁和非公平锁。
- Share(共享锁):多个线程可同时占有锁资源,如Semaphore、CountDownLatch、CyclicBarrier、ReadWriteLock的Read锁。
AQS加锁过程
以ReentrantLock为例
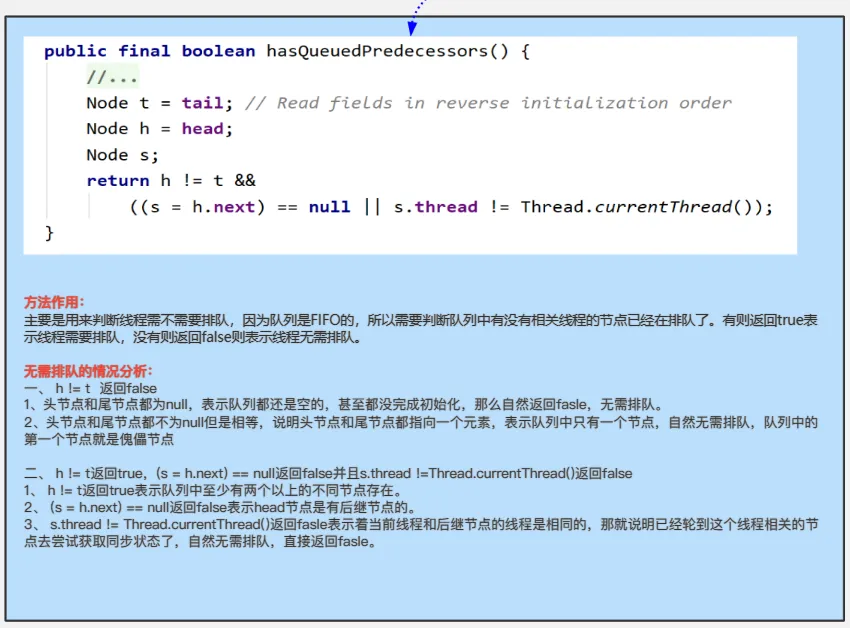
!tryAcquire(arg)
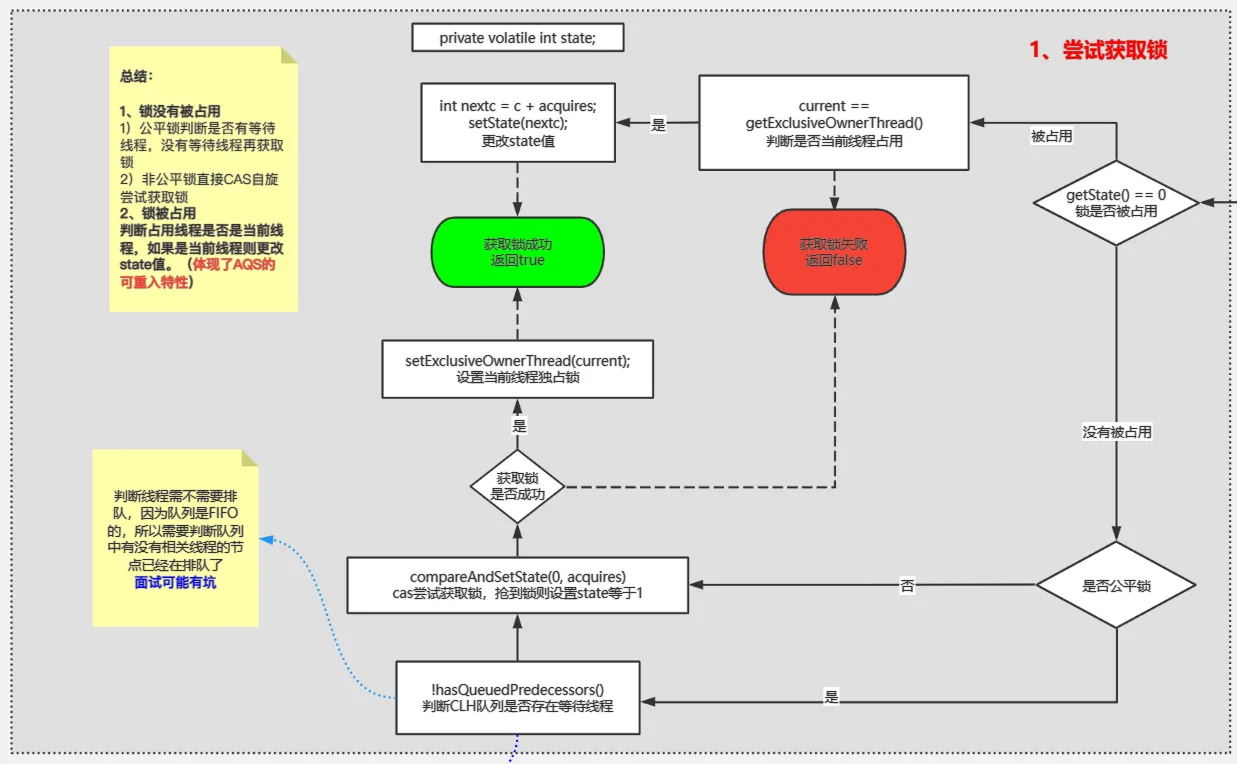
addWaiter
acquireQueued
AQS抢锁原理
模板方法:acquire
acquire是AQS封装好的获取资源的公共入口,它是AQS提供的利用独占的方式获取资源的方法,源码实现如下:
public final void acquire(int arg) {
if (!tryAcquire(arg) &&
acquireQueued(addWaiter(Node.EXCLUSIVE), arg))
selfInterrupt();
}
通过源码可以发现,acquire(arg)至少执行一次tryAcquire(arg)钩子方法。tryAcquire(arg)方法AQS默认抛出一个异常,具体的获取独占资源state的逻辑需要钩子方法来实现。若调用tryAcquire(arg)尝试成功,则acquire()将直接返回,表示已经抢到锁;若不成功,则将线程加入等待队列。
钩子方法:tryAcquire
tryAcquire(int) 独占方式。尝试获取资源,成功则返回true,失败则返回false。
protected boolean tryAcquire(int unused) {
//CAS操作,更新成功,则设置线程独占,返回true
if (compareAndSetState(0, 1)) {
setExclusiveOwnerThread(Thread.currentThread());
return true;
}
return false;
}
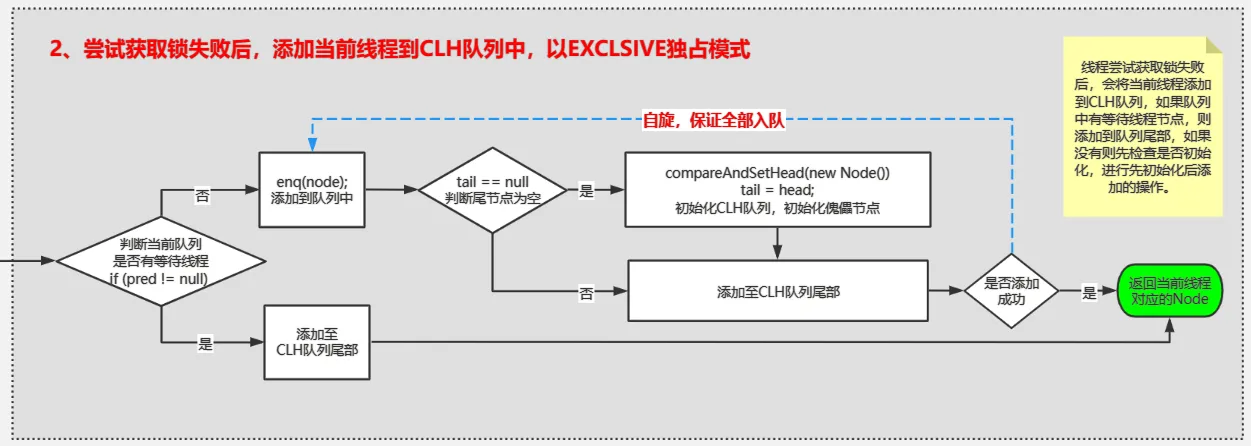
直接入队:addWaiter
在acquire模板方法中,如果钩子方法tryAcquire尝试获取同步状态失败的话,就构造同步节点(独占式节点模式为Node.EXCLUSIVE),通过addWaiter(Node node,int args)方法将该节点加入同步队列的队尾。
private Node addWaiter(Node mode) {
Node node = new Node(Thread.currentThread(), mode);
// Try the fast path of enq; backup to full enq on failure
Node pred = tail;
if (pred != null) {
node.prev = pred;
if (compareAndSetTail(pred, node)) {
pred.next = node;
return node;
}
}
enq(node);
return node;
}
自旋入队:enq
addWaiter()第一次尝试在尾部添加节点失败,意味着有并发抢锁发生,需要进行自旋。enq()方法通过CAS自旋将节点添加到队列尾部。
节点在第一次入队失败后,就会开始自旋入队,分为以下两种情况:
(1)如果AQS的队列非空,新节点入队的插入位置在队列的尾部,并且通过CAS方式插入,插入之后AQS的tail将指向新的尾节点。
(2)如果AQS的队列为空,新节点入队时,AQS通过CAS方法将新节点设置为头节点head,并且将tail指针指向新节点。
private Node enq(final Node node) { for (;;) { //自旋入队 Node t = tail; if (t == null) { //队列为空,初始化尾节点和头节点为新节点 if (compareAndSetHead(new Node())) tail = head; } else { //如果队列不为空,将新节点插入队列尾部 node.prev = t; if (compareAndSetTail(t, node)) { t.next = node; return t; } } } }
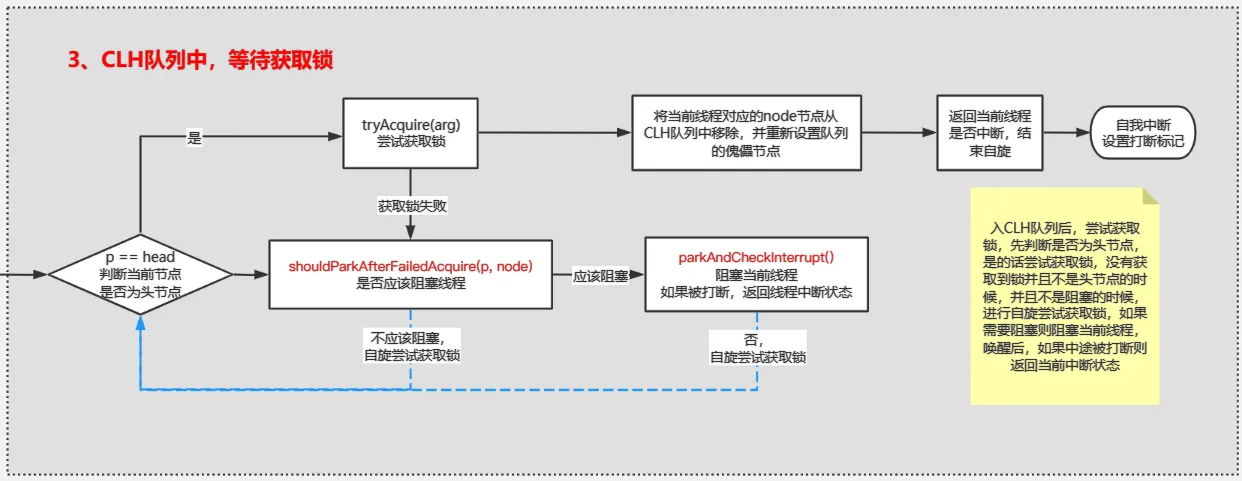
节点出队的算法在acquireQueued()方法中,这是一个非常重要的模板方法。acquireQueued()方法不断在前驱节点上自旋(for死循环),如果前驱节点是头节点并且当前线程使用钩子方法tryAcquire(arg)获得了锁,就移除头节点,将当前节点设置为头节点。
final boolean acquireQueued(final Node node, int arg) { boolean failed = true; try { boolean interrupted = false; // 在前驱节点上自旋 for (;;) { // 获取节点的前驱节点 final Node p = node.predecessor(); // (1)前驱节点是头节点 // (2)通过子类的tryAcquire()钩子实现抢占成功 if (p == head && tryAcquire(arg)) { // 将当前节点设置为头节点,之前的头节点出队 setHead(node); p.next = null; // help GC failed = false; return interrupted; } // 省略park(无限期阻塞)线程的代码 } } finally { // 省略其他 } }
自旋抢占:acquireQueued()
在节点入队之后,启动自旋抢锁的流程。acquireQueued()方法的主要逻辑:当前Node节点线程在死循环中不断获取同步状态,并且不断在前驱节点上自旋,只有当前驱节点是头节点时才能尝试获取锁,原因是:
- 头节点是成功获取同步状态(锁)的节点,而头节点的线程释放了同步状态以后,将会唤醒其后继节点,后继节点的线程被唤醒后要检查自己的前驱节点是否为头节点。
- 维护同步队列的FIFO原则,节点进入同步队列之后,就进入了自旋的过程,每个节点都在不断地执行for死循环。
final boolean acquireQueued(final Node node, int arg) {
boolean failed = true;
try {
boolean interrupted = false;
for (;;) {
final Node p = node.predecessor();
if (p == head && tryAcquire(arg)) {
setHead(node);
p.next = null; // help GC
failed = false;
return interrupted;
}
//节点p不是head节点,或者抢锁失败,执行这里,挂起当前线程
if (shouldParkAfterFailedAcquire(p, node) && parkAndCheckInterrupt())
interrupted = true;
}
} finally {
//如果挂起现场异常,则执行取消抢锁操作
if (failed)
cancelAcquire(node);
}
}
挂起预判:shouldParkAfterFailedAcquire()
acquireQueued()自旋在阻塞自己的线程之前会进行挂起预判。shouldParkAfterFailedAcquire()方法的主要功能是:将当前节点的有效前驱节点(是指有效节点不是CANCELLED类型的节点)找到,并且将有效前驱节点的状态设置为SIGNAL,之后返回true代表当前线程可以马上被阻塞了。
具体可以分为三种情况:
- 如果前驱节点的状态为?1(SIGNAL),说明前驱的等待标志已设好,返回true表示设置完毕。
- 如果前驱节点的状态为1(CANCELLED),说明前驱节点本身不再等待了,需要跨越这些节点,然后找到一个有效节点,再把当前节点和这个有效节点的唤醒关系建立好:调整前驱节点的next指针为自己。
- 如果是其他情况:?3(PROPAGATE,共享锁等待)、?2(CONDITION,条件等待)、0(初始状态),那么通过CAS尝试设置前驱节点为SIGNAL,表示只要前驱节点释放锁,当前节点就可以抢占锁了。
private static boolean shouldParkAfterFailedAcquire(Node pred, Node node) {
int ws = pred.waitStatus;
if (ws == Node.SIGNAL)
/*
* This node has already set status asking a release
* to signal it, so it can safely park.
*/
return true;
if (ws > 0) {
/*
* Predecessor was cancelled. Skip over predecessors and
* indicate retry.
*/
do {
node.prev = pred = pred.prev;
} while (pred.waitStatus > 0);
pred.next = node;
} else {
/*
* waitStatus must be 0 or PROPAGATE. Indicate that we
* need a signal, but don't park yet. Caller will need to
* retry to make sure it cannot acquire before parking.
*/
compareAndSetWaitStatus(pred, ws, Node.SIGNAL);
}
return false;
}
线程挂起:parkAndCheckInterrupt()
parkAndCheckInterrupt()的主要任务是暂停当前线程
private final boolean parkAndCheckInterrupt() {
LockSupport.park(this);
return Thread.interrupted();
}
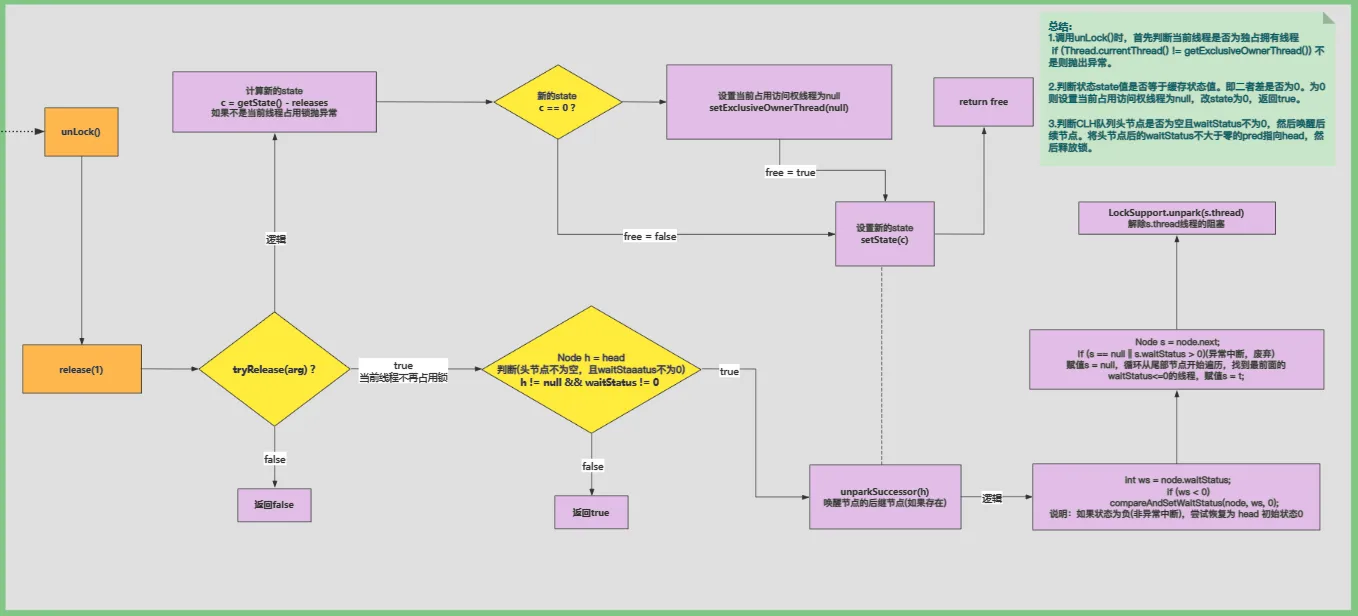
AQS释放锁原理
AQS模板方法:release()
SimpleMockLock的unlock()方法被调用时,会调用AQS的release(…)的模板方法。AQS的release(…)的模板方法代码如下:
public final boolean release(long arg) {
if (tryRelease(arg)) {
Node h = head;
if (h != null && h.waitStatus != 0)
unparkSuccessor(h);
return true;
}
return false;
}
钩子实现:tryRelease()
tryRelease()方法是需要子类提供实现的一个钩子方法,需要子类根据具体业务进行具体的实现。
protected final boolean tryRelease(int releases) {
// 首先将当前持有锁的线程个数减1(回溯到调用源头sync.release(1)可知, releases的值为1)
// 这里的操作主要是针对可重入锁的情况下, c可能大于1
int c = getState() - releases;
// 释放锁的线程当前必须是持有锁的线程
if (Thread.currentThread() != getExclusiveOwnerThread())
throw new IllegalMonitorStateException();
// 如果c为0了, 说明锁已经完全释放了
boolean free = false;
if (c == 0) {
free = true;
setExclusiveOwnerThread(null);
}
setState(c);
return free;
}
唤醒后继:unparkSuccessor()
release()钩子执行tryRelease()钩子成功之后,使用unparkSuccessor()唤醒后继节点
private void unparkSuccessor(Node node) {
int ws = node.waitStatus;
// 如果head节点的ws比0小, 则直接将它设为0
if (ws < 0)
compareAndSetWaitStatus(node, ws, 0);
// 通常情况下, 要唤醒的节点就是自己的后继节点
// 如果后继节点存在且也在等待锁, 那就直接唤醒它
// 但是有可能存在 后继节点取消等待锁 的情况
// 此时从尾节点开始向前找起, 直到找到距离head节点最近的ws<=0的节点
Node s = node.next;
if (s == null || s.waitStatus > 0) {
s = null;
for (Node t = tail; t != null && t != node; t = t.prev)
if (t.waitStatus <= 0)
s = t; // 注意! 这里找到了之并有return, 而是继续向前找
}
// 如果找到了还在等待锁的节点,则唤醒它
if (s != null)
LockSupport.unpark(s.thread);
}
聊聊 ReentrantLock
ReentrantLock 指的是一个线程能够对一个临界资源重复加锁。ReentrantLock继承了Lock接口并实现了在接口中定义的方法,是一个可重入的独占锁。ReentrantLock通过自定义队列同步器(Abstract Queued Sychronized,AQS)来实现锁的获取与释放。
🥴tips:
- 独占锁:该锁在同一时刻只能被一个线程获取,而获取锁的其他线程只能在同步队列中等待;
- 可重入锁:该锁能够支持一个线程对同一个资源执行多次加锁操作。
ReentrantLock不但提供了synchronized对锁的操作功能,还提供了诸如可响应中断锁、可轮询锁请求、定时锁等避免多线程死锁的方法。
ReentrantLock之所以被称为可重入锁,是因为ReentrantLock锁可以反复进入。即允许连续两次获得同一把锁,两次释放同一把锁。将上述代码中的注释部分去掉后,程序仍然可以正常执行。如果释放锁的次数少于获取锁的次数,该线程就会一直持有该锁,其他线程将无法获取锁资源。
再次强调!ReentrantLock主要理解两个概念:
可重入的含义:表示该锁能够支持一个线程对资源的重复加锁,也就是说,一个线程可以多次进入同一个锁所同步的临界区代码块。比如,同一线程在外层函数获得锁后,在内层函数能再次获取该锁,甚至多次抢占到同一把锁。
独占的含义:在同一时刻只能有一个线程获取到锁,而其他获取锁的线程只能等待,只有拥有锁的线程释放了锁后,其他的线程才能够获取锁。
敲黑板:可重入锁的一个好处是可一定程度避免死锁。
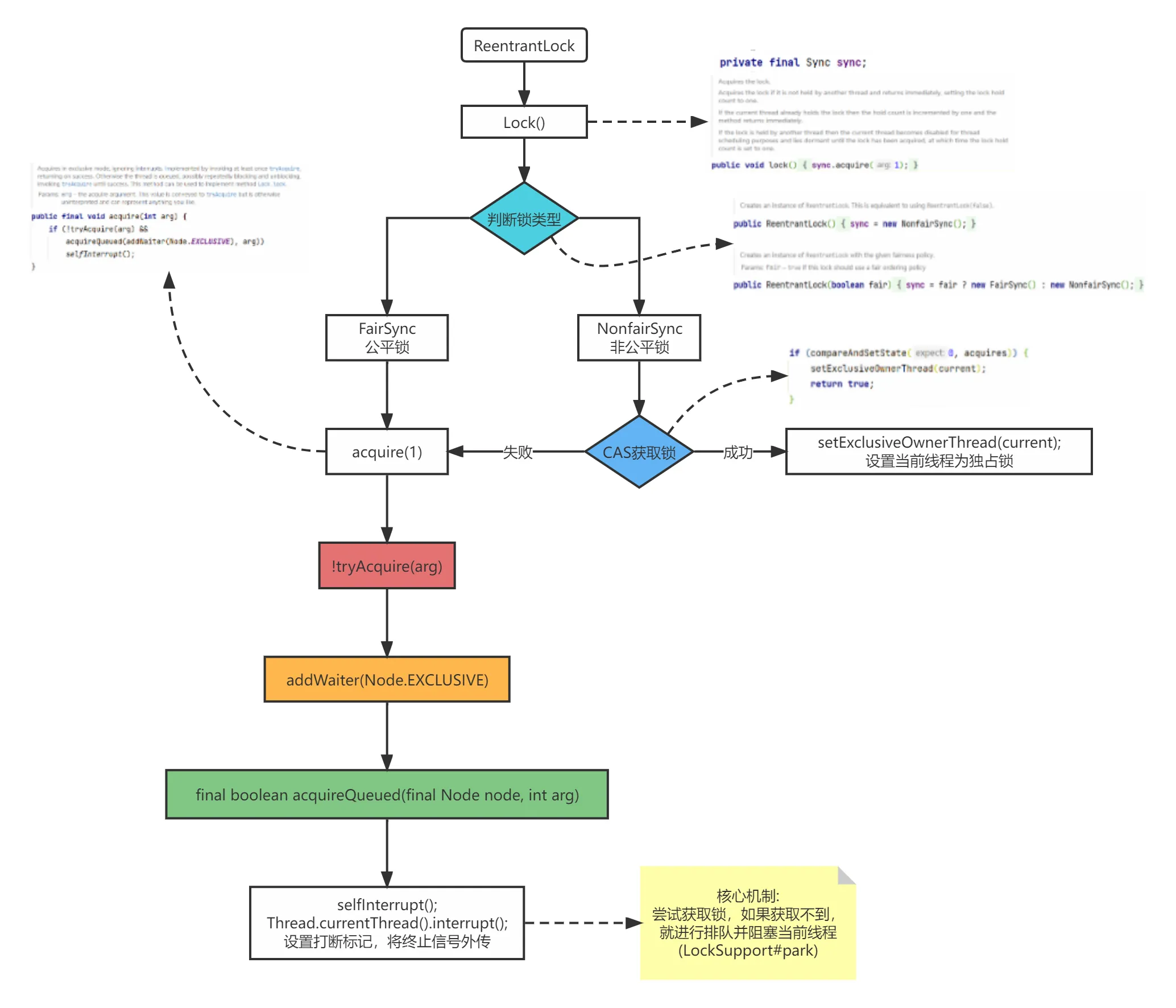
ReentrantLock 里面有一个内部类 Sync,Sync 继承 AQS(AbstractQueuedSynchronizer),添加锁和释放锁的大部分操作实际上都是在 Sync 中实现的。Sync 有公平锁 FairSync 和非公平锁 NonfairSync 两个子类。
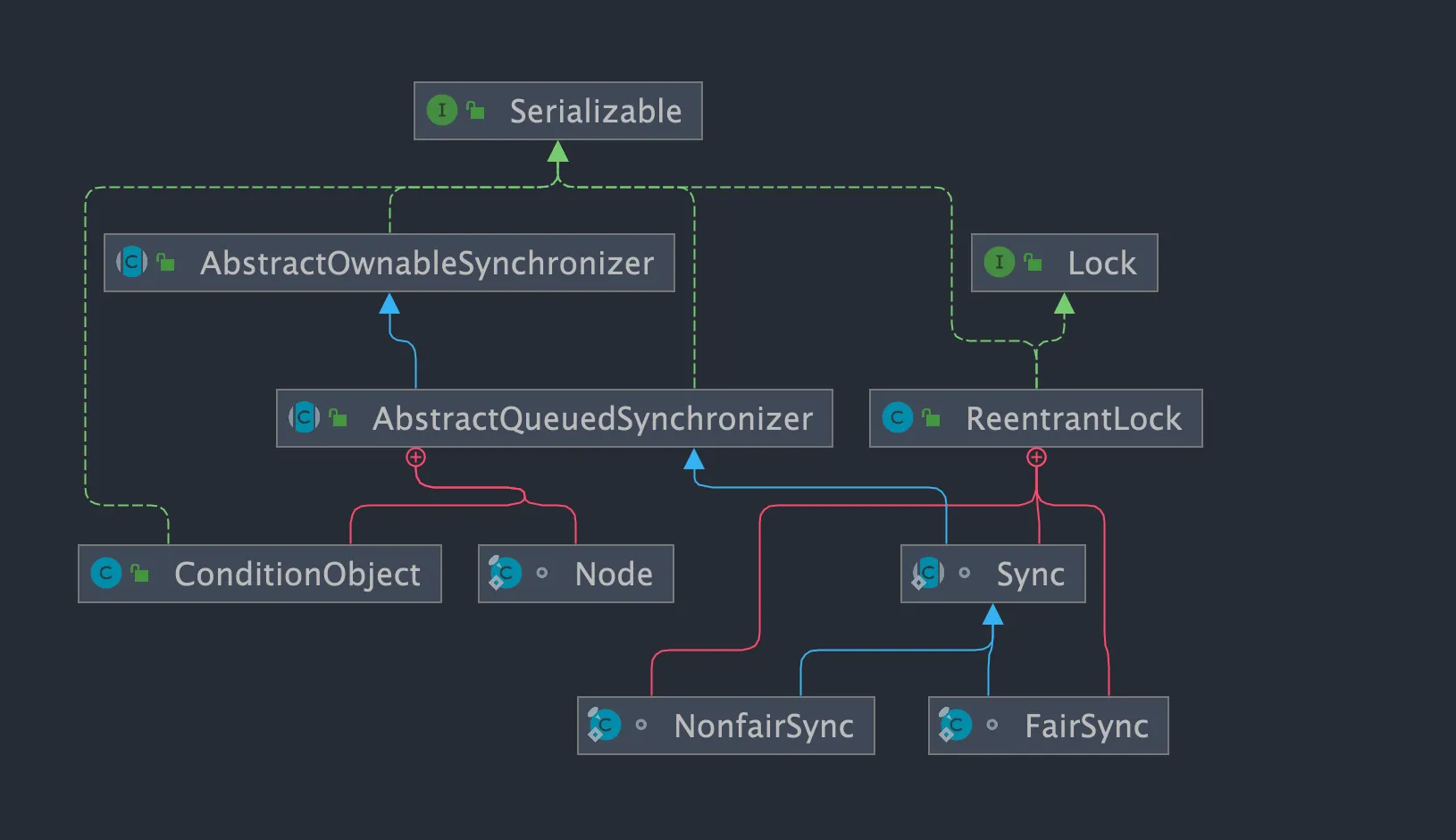 ReentrantLock 默认使用非公平锁,也可以通过构造器来显示的指定使用公平锁。
ReentrantLock 默认使用非公平锁,也可以通过构造器来显示的指定使用公平锁。
// 传入一个 boolean 值,true 时为公平锁,false 时为非公平锁
public ReentrantLock(boolean fair) {
sync = fair ? new FairSync() : new NonfairSync();
}
从上面的内容可以看出, ReentrantLock 的底层就是由 AQS 来实现的。
避免死锁
响应中断 在synchronized中如果有一个线程尝试获取一把锁,则其结果是要么获取锁继续执行,要么保持等待。ReentrantLock还提供了可响应中断的可能,即在等待锁的过程中,线程可以根据需要取消对锁的请求。
可轮询锁 通过boolean tryLock()获取锁。如果有可用锁,则获取该锁并返回true,如果无可用锁,则立即返回false。
定时锁 通过boolean tryLock(long time,TimeUnit unit) throws InterruptedException获取定时锁。如果在给定的时间内获取到了可用锁,且当前线程未被中断,则获取该锁并返回true。如果在给定的时间内获取不到可用锁,将禁用当前线程,并且在发生以下三种情况之前,该线程一直处于休眠状态。
- 当前线程获取到了可用锁并返回true。
- 当前线程在进入此方法时设置了该线程的中断状态,或者当前线程在获取锁时被中断,则将抛出InterruptedException,并清除当前线程的已中断状态。
- 当前线程获取锁的时间超过了指定的等待时间,则将返回false。如果设定的时间小于等于0,则该方法将完全不等待。
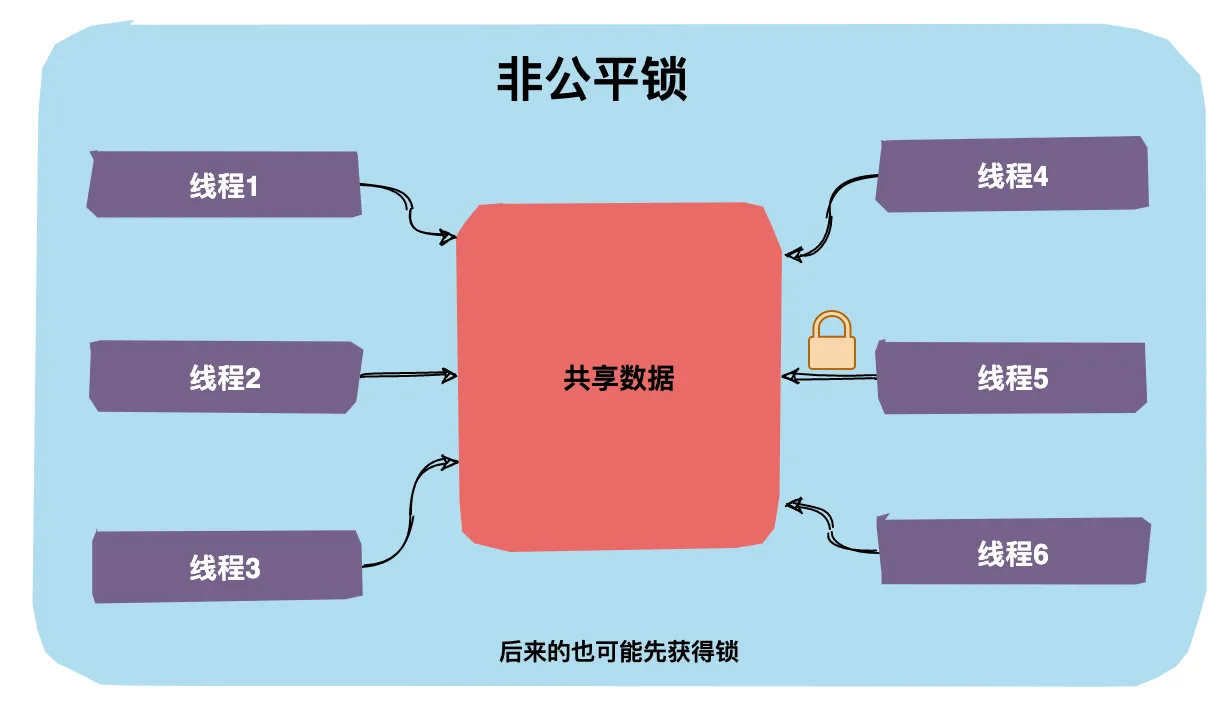
非公平锁
什么是非公平锁呢?非公平锁是指多个线程获取锁的顺序并不一定是其申请锁的顺序,有可能后申请的线程比先申请的线程优先获取锁,抢锁成功的次序不一定体现为FIFO(先进先出)顺序。非公平锁的优点在于吞吐量比公平锁大,它的缺点是有可能会导致线程优先级反转或者线程饥饿现象。
/**
* 创建一个可重入锁,true 表示公平锁,false 表示非公平锁。默认非公平锁
*/
Lock lock = new ReentrantLock(false);
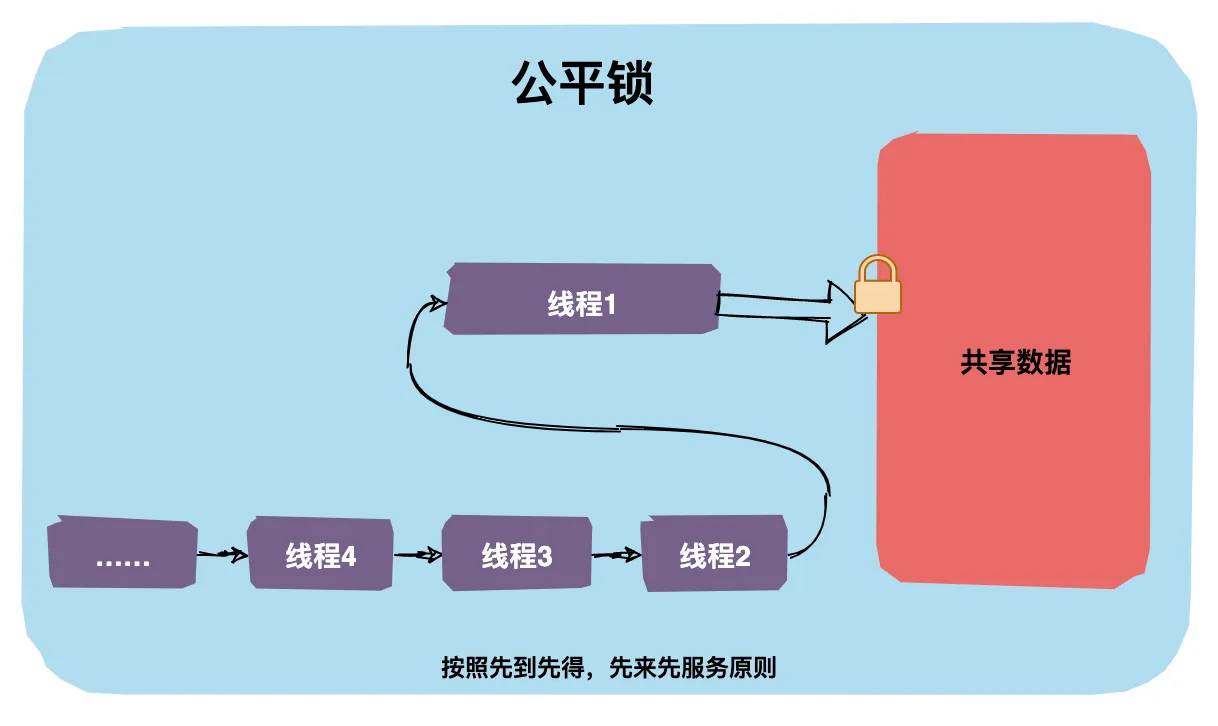
公平锁
什么是公平锁呢?公平锁是指多个线程按照申请锁的顺序来获取锁,抢锁成功的次序体现为FIFO(先进先出)顺序。虽然ReentrantLock锁默认是非公平锁,但可以通过构造器指定该锁为公平锁
/**
* 创建一个可重入锁,true 表示公平锁,false 表示非公平锁。默认非公平锁
*/
Lock lock = new ReentrantLock(true);
CyclicBarrier 和 CountDownLatch 的区别
CountDownLatch 是计数器,只能使用一次,而 CyclicBarrier 的计数器提供 reset 功能,可以多次使用。但是我不那么认为它们之间的区别仅仅就是这么简单的一点。我们来从 jdk 作者设计的目的来看,javadoc 是这么描述它们的:
CountDownLatch: A synchronization aid that allows one or more threads to wait until a set of operations being performed in other threads completes.(CountDownLatch: 一个或者多个线程,等待其他多个线程完成某件事情之后才能执行;) CyclicBarrier : A synchronization aid that allows a set of threads to all wait for each other to reach a common barrier point.(CyclicBarrier : 多个线程互相等待,直到到达同一个同步点,再继续一起执行。)
对于 CountDownLatch 来说,重点是“一个线程(多个线程)等待”,而其他的 N 个线程在完成“某件事情”之后,可以终止,也可以等待。而对于 CyclicBarrier,重点是多个线程,在任意一个线程没有完成,所有的线程都必须等待。
CountDownLatch 是计数器,线程完成一个记录一个,只不过计数不是递增而是递减,而 CyclicBarrier 更像是一个阀门,需要所有线程都到达,阀门才能打开,然后继续执行。
乐观锁和悲观锁的区别
乐观锁
原理:适用于读多写少的场景,乐观认为并发可能性小。乐观锁的实现通常采用基于CAS的无锁算法,通过比较当前版本号和自己保持一致来进行数据更新操作,例如Java中的Atomic类就是基于CAS操作实现的乐观锁机制。(ps. CAS:Compare And Set)。
乐观锁是一种抽象的概念,而CAS是这种抽象的具体实现之一。
实际上,如果需要完成数据的最终更新,仅仅进行一次CAS操作是不够的,一般情况下,需要进行自旋操作,即不断地循环重试CAS操作直到成功,这也叫CAS自旋。
通过CAS自旋,在不使用锁的情况下实现多线程之间的变量同步,也就是说,在没有线程被阻塞的情况下实现变量的同步,这叫作“非阻塞同步”(Non-Blocking Synchronization),或者说“无锁同步”。使用基于CAS自旋的乐观锁进行同步控制,属于无锁编程(Lock Free)的一种实践。
拓展:自旋锁
原理:如果持有锁的线程很快就释放锁资源,那么这些等待竞争锁的待释放再重新被锁上的线程不用在内核态和用户态的影响下切换并进入阻塞挂起状态,他们只需要自旋等一会等待其他线程释放锁后立即获取锁。
悲观锁
原理:适用于写多读少的场景,悲观锁的实现则通常采用基于独占锁的方式,Java的synchronized是悲观锁的一种实现。悲观锁可以确保无论哪个线程持有锁,都能独占式访问临界区。虽然悲观锁的逻辑非常简单(在使用synchronized时,线程需要先获取锁才可以执行对共享变量的读写操作,其他线程必须等待锁释放后才能再次尝试获取锁并进行访问),但是存在不少问题。悲观锁总是假设会发生最坏的情况,每次线程读取数据时,也会上锁。这样其他线程在读取数据时就会被阻塞,直到它拿到锁。传统的关系型数据库用到了很多悲观锁,比如行锁、表锁、读锁、写锁等;直接加Synchronize,AQS框架是先CAS获取锁,获取不到后加Synchronize悲观锁 eg:ReentranLock。
需要注意的是,CAS和synchronized虽然是乐观锁和悲观锁的典型实现方式,但并不意味着所有的乐观锁都必须使用CAS,所有的悲观锁都必须使用synchronized。在具体应用中,还可以根据具体需求选择其他适合的实现方式。